matlab simulink 单级倒立摆的神经网络控制
1、内容简介
略
67-可以交流、咨询、答疑
2、内容说明
略
matlab simulink 单级倒立摆的神经网络控制
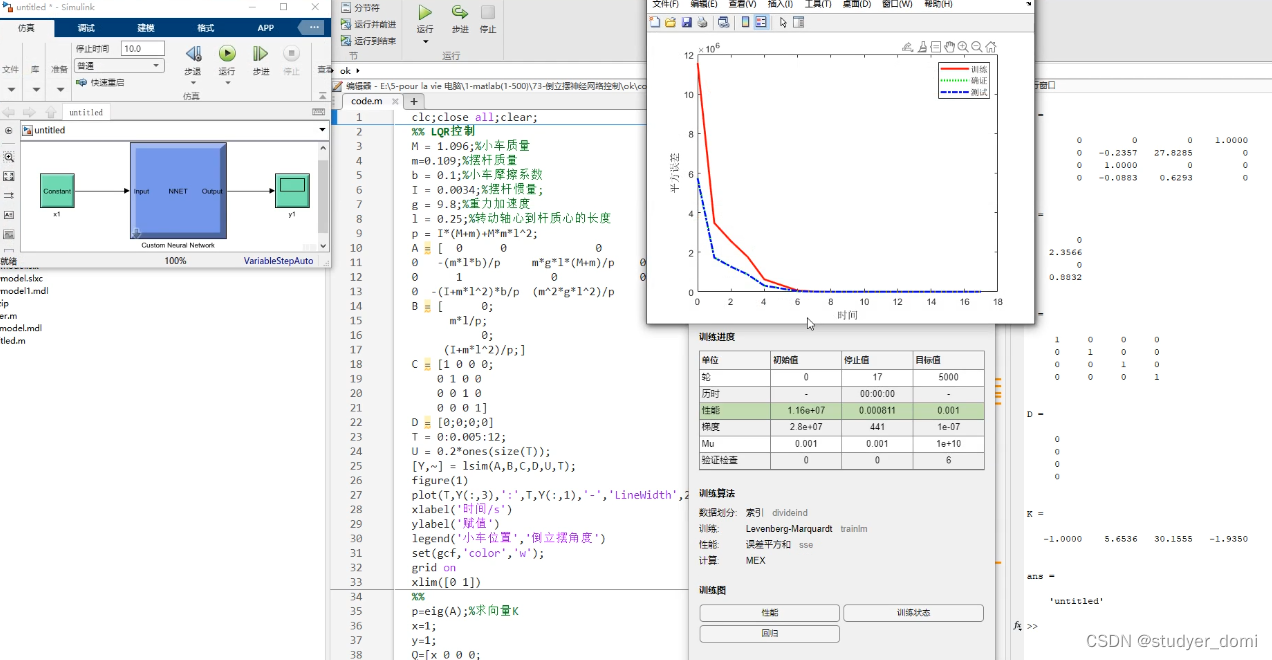
lqr、神经网络训练
倒立摆系统是一种控制领域中典型的多个变量参数、控制模型非线性、参数强耦合物理模型。它作为一种被控模型,常常被用来验证理论的可靠性和控制的稳定性。人工神经网络由于具有信息的分布存储、并行处理以及自学习能力等优点,在图像处理、家电控制、物理控制及人工智能等领域得到越来越广泛的应用。近年来,研究者已有提出了多种神经网络模型并展开了深入研究。从理论上神经网络可以模拟出任意的非线性函数,所以它特别适合控制像倒立摆这样的结果严重非线性、多变量参数系统。本文针对倒立摆,通过动力学知识,建立了倒立摆的数学模型,研究了它的传递函数和状态矩阵。通过数学软件MATLAB建立了simulink模型,分别先后提出了PID、LQR和神经网络三种控制方法,结果表明,相对于其他的2种控制方法,神经网络能够更加有效控制倒立摆。神经网络能够缩短响应时间,同时减少超调量。
关键词:倒立摆,PID, LQR,神经网络,MATLAB
3、仿真分析
略
4、参考论文
略