辣椒采摘机器人的结构设计
目 录
1绪论 1
1.1课题研究的意义 1
1.2国内外辣椒采摘机器人发展状况 1
1.4研究的内容和方法 4
1.5预期目标 5
1.6重点研究的关键问题及解决思路 5
1.7工作条件及解决方法 5
2辣椒采摘机器人总体设计 6
2.1收获的典型方法及收获方案的选择 6
2.2辣椒采摘机器人机的结构 6
3采摘机器人的基本参数的确定及相关设计 7
3.1作业速度 7
3.2割幅 8
3.3喂入量 8
3.4割刀速度和机器前进速度的关系 9
3.5辣椒采摘机器人下刀盘托的直径,拔辣椒盘尺寸和收缩比 10
3.6轴距、轮距、接地压力和最小离地间隙联合采摘机器人的轴距 10
3.7割刀切割数据计算 11
4切割系统的设计 13
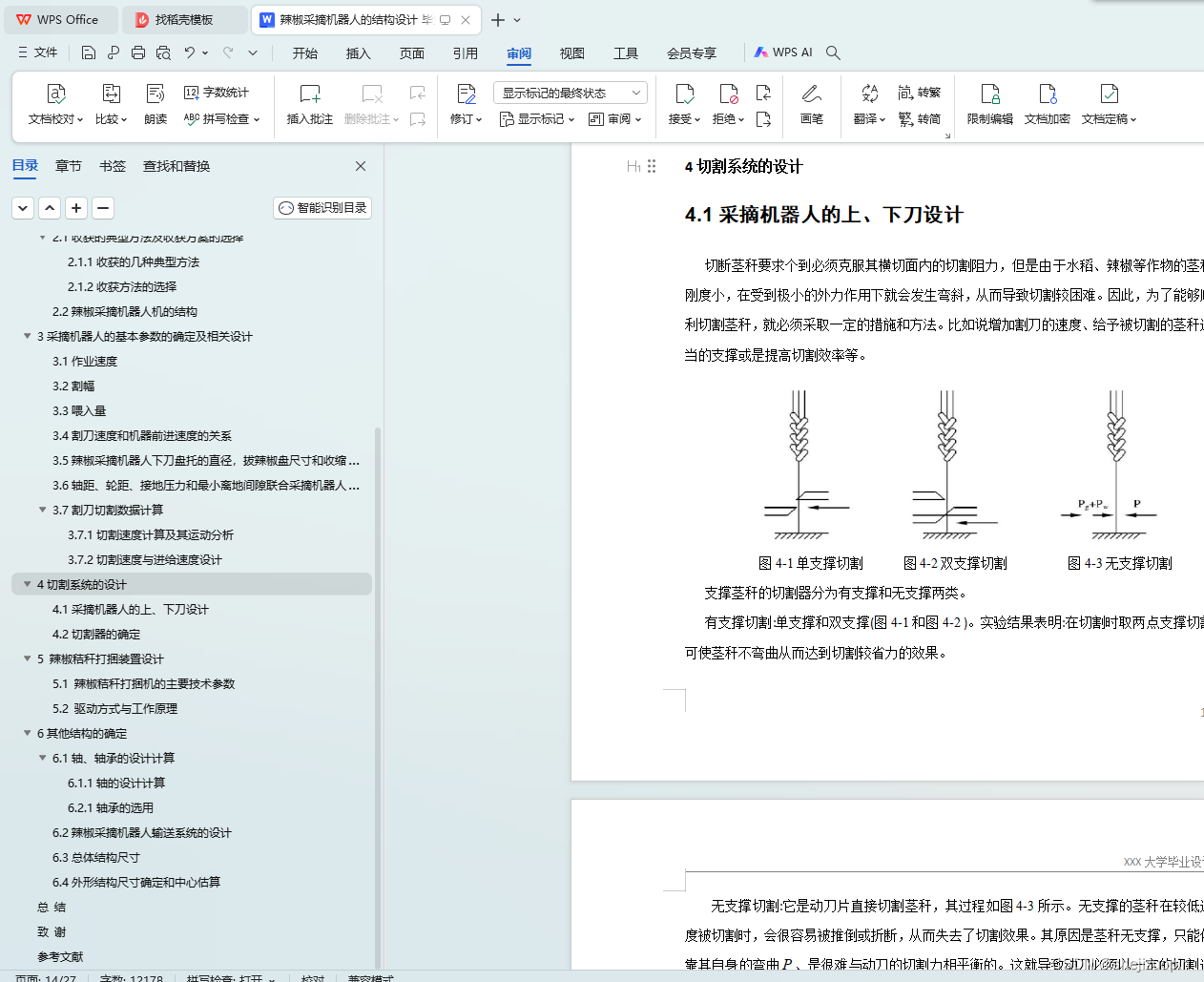
4.1采摘机器人的上、下刀设计 13
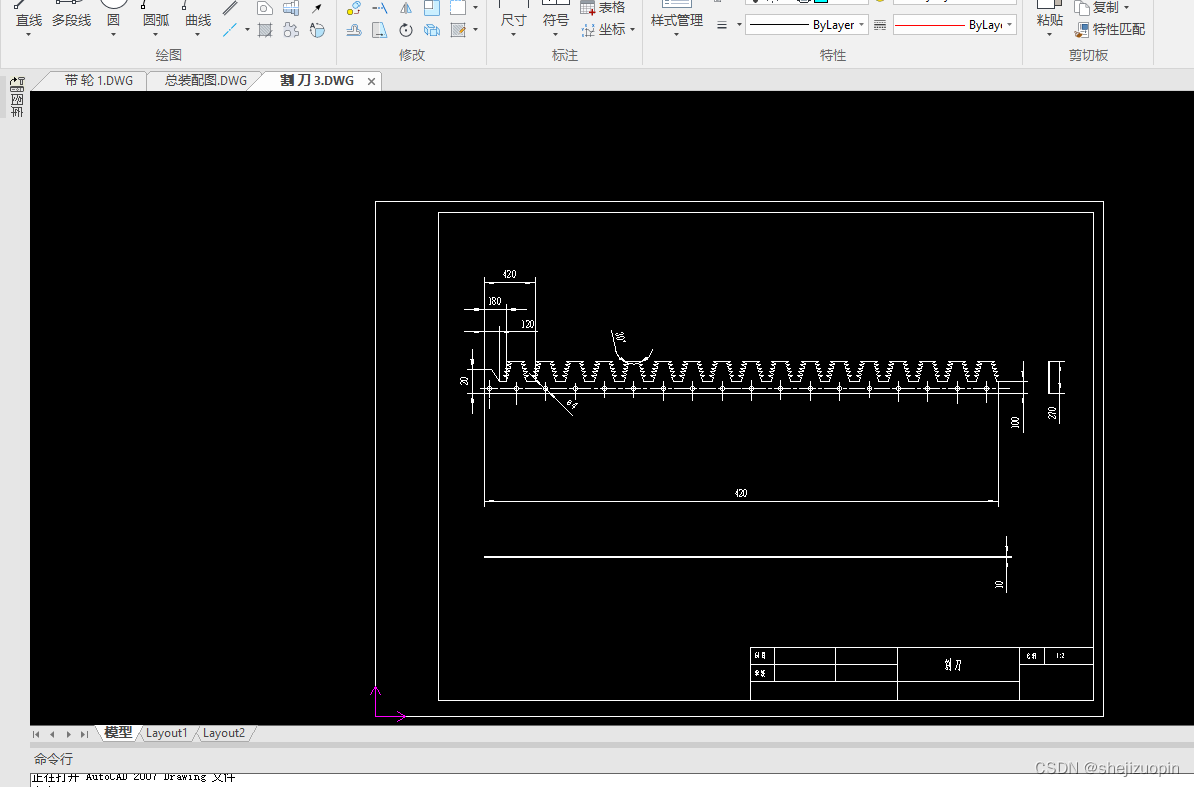
4.2切割器的确定 14
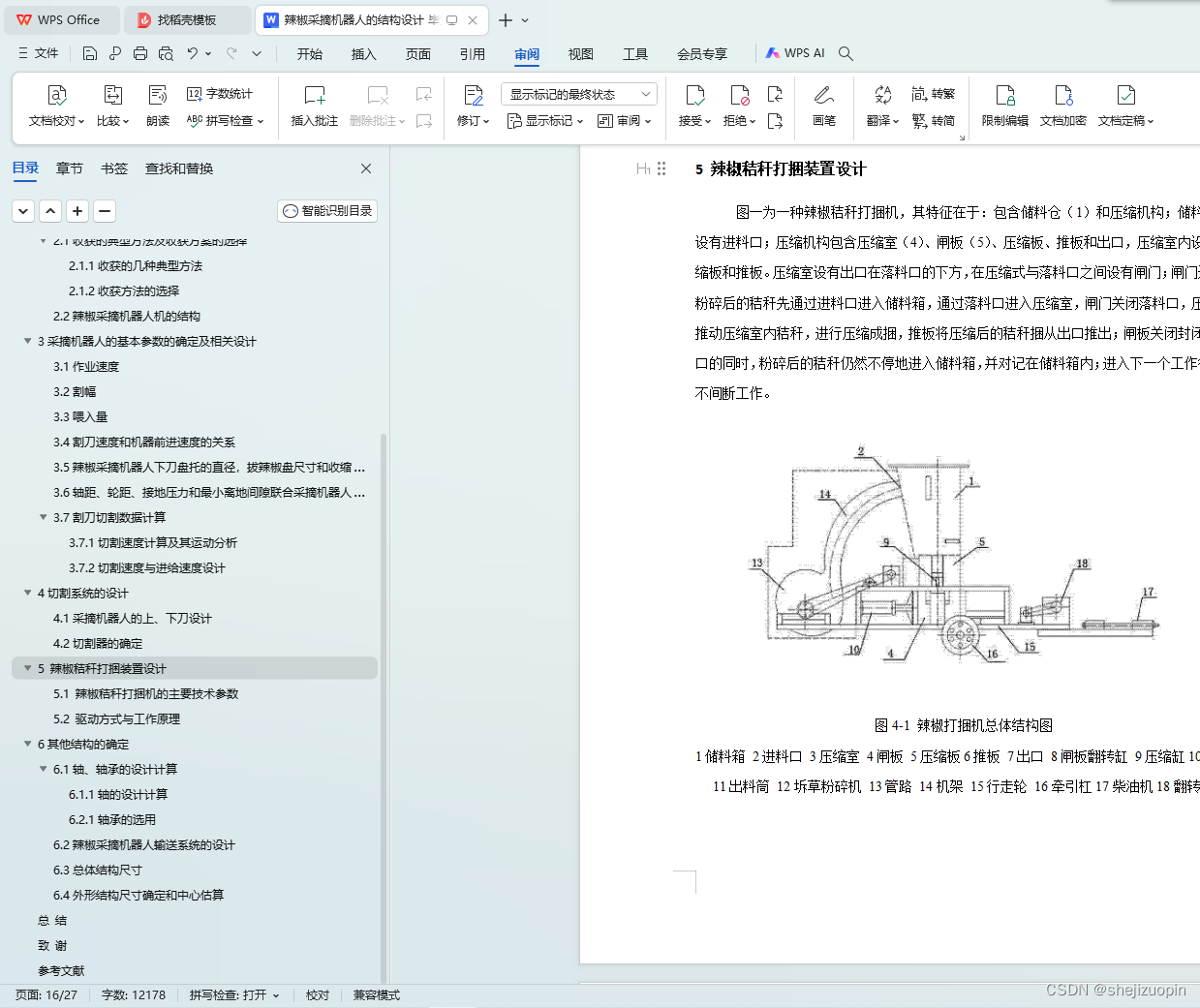
5 辣椒秸秆打捆装置设计 15
5.1 辣椒秸秆打捆机的主要技术参数 15
5.2 驱动方式与工作原理 16
6其他结构的确定 17
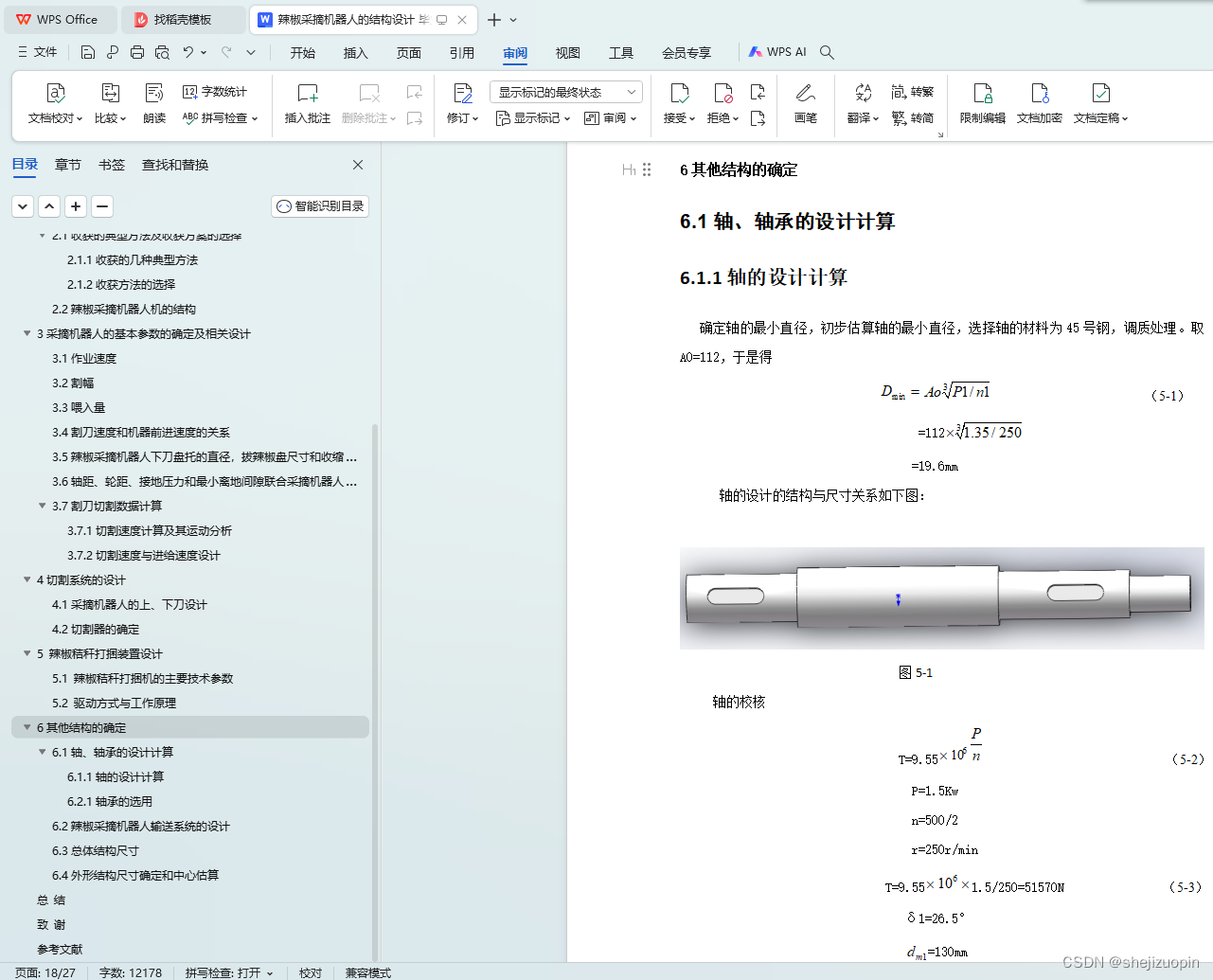
6.1轴、轴承的设计计算 17
6.2辣椒采摘机器人输送系统的设计 21
6.3总体结构尺寸 22
6.4外形结构尺寸确定和中心估算 22
总 结 23
致 谢 24
参考文献 25
参考文献 23
1.4研究的内容和方法
1.4.1研究的内容
(1)熟悉辣椒采摘机器人各个机构的构成;
(2)完成辣椒采摘机器人动力驱动系统设计与研发;
(3)完成辣椒采摘机器人传动系统、执行机构的设计;
(4)完成辣椒采摘机器人整体机构的设计;
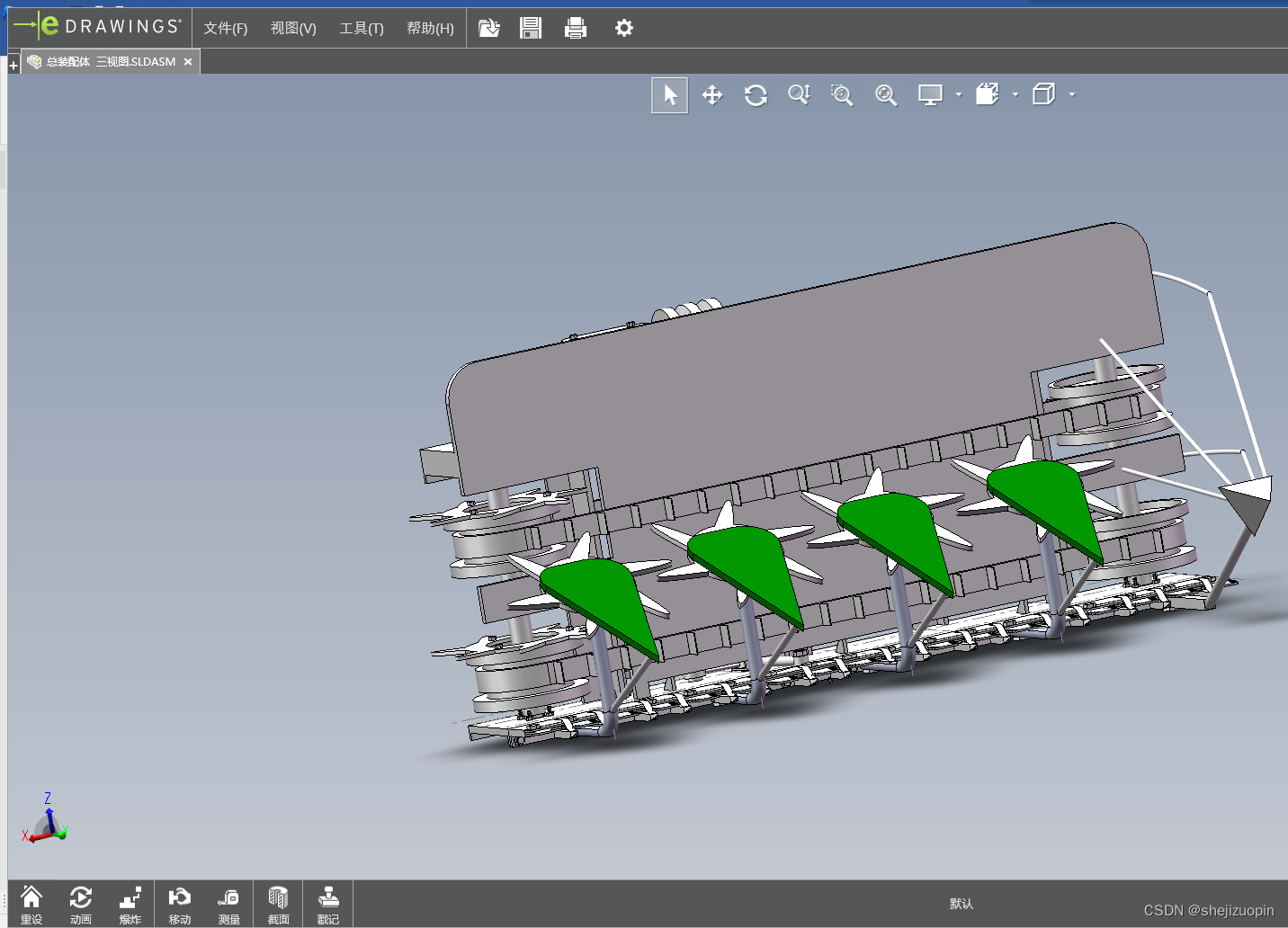
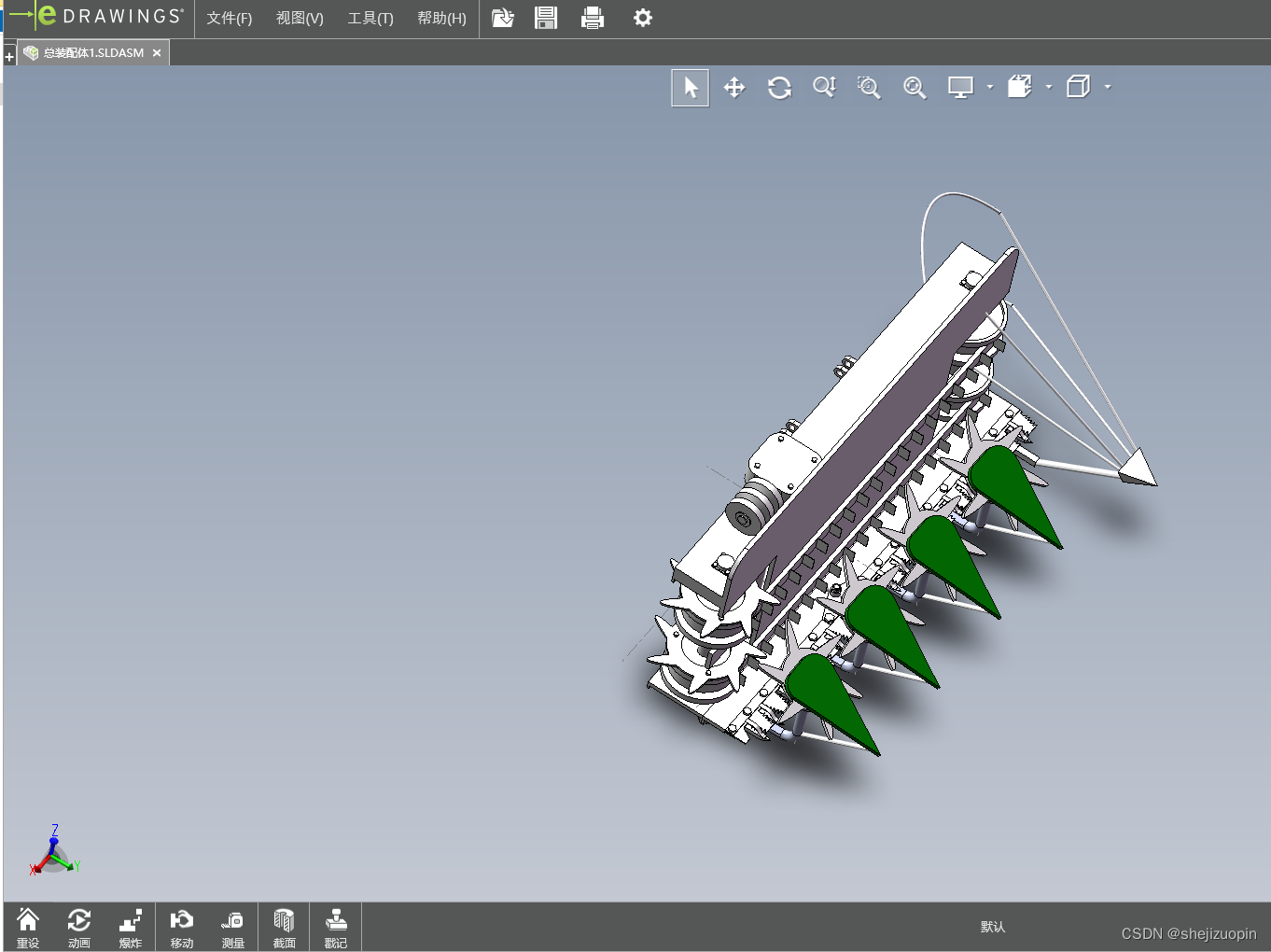
(5)建立整机的三维模型。
1.4.2研究的方法
(1)利用文献搜索方法进行中外文献资料的收集;
(2)调查研究国内外微型采摘机器人的设计;
(3)利用机械设计理论对整机进行设计计算;
(4)利用SolidWorks软件进行三维建模;
(5)试制样机;
(6)到田间进行试验和各性能的检验;
(7)改进和完善样机,确定最终图纸。
1.5预期目标
(1)对切割器刀片切割辣椒秆的切入方式和所受的阻力进行;
(2)对机器中的各个部件,进行受力分析。进而使动力在机构的传递过程中减少损失;
(3)对机器整体轮廓的优化设计。
1.6重点研究的关键问题及解决思路
(1)尽可能多的搜集一些相关的资料,在充分了解的基础上,获得更多的思路去解决问题;
(2)结合自己查阅的资料,对辣椒采摘机器人机构的相关知识进行梳理,整合出最适合于小 辣椒收获的机器;
(3)借鉴前人设计相关机械过程中的经验,取长补短完成设计。同时积极与指导老师商讨,确定最佳方案;
(4)选择合适动力传动方式,设计循环装置和传动装置;
(5)利用Auto CAD软件,绘制二维零件图和装配图;
(6)利用SolidWorks进行虚拟样机设计,完成整机各零件的三维建模。