永磁同步电机矢量控制(三)——电流环 PI 参数整定(二)
前面我们把电流环的闭环传递函数整定成了典型的二阶系统。这里我们再简化处理下电流环,把电流环闭环传递函数整定成一阶惯性环节。
1、电流环PI参数整定
首先,我们忽略上节电流环传递函数框图中的延迟环节和逆变器环节,这样电流环的开环传递函数为:
注意:电机电压方程的耦合项可以作为前馈,和电机模型里的反电势进行抵消;或者有的设计不加前馈,就是单纯的PI调节器,那么就靠PI调节器的积分快速累积去和电机模型里的反电势进行抵消。
那么电流开环传递函数为:
我们通过选取合适的PI参数来实现零极点对消,使其降阶变为一阶惯性系统,如下:
那么电流的开环传递函数简化为:

这样就化成了典型的一阶系统的开环传函,其闭环传函为:
这里wc为电流环带宽,单位rad/s。
2、电流环带宽选择
一般电流环带宽选取为PWM开关频率f的1/(10~20)之间。
也就是电流环带宽可以设置为200~1000 HZ之间。
3、电流环带宽的测试方法
电流环的带宽,可以先通过仿真确认,实际实验中,可通过阶跃响应的上升时间或者正弦响应的伯德图确认。
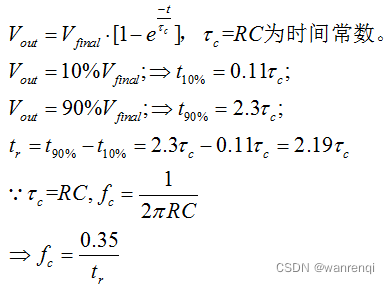
类比一阶RC低通滤波电路

fc为一阶低通滤波器的截止频率,tr为上升时间 ,其定义为输出稳定值10%-90%的时间差。
推导下公式的由来:
总结下:本节是在不考虑电流控制回路中的延迟,来设计电流环的PI参数的,而实际系统中,延时是真实存在的,这样的话,按理想情况下(不带延时)设计的带宽参数和实际的系统带宽是不相等的,而且两者之间存在较大的偏差,甚至有2、3倍的关系。虽然我们在电流环 PI 参数整定(一)中有考虑延时,但是没有具体讲解考虑延时后,带宽的设计和PI参数的整定。下一节我们就讲这个。见:永磁同步电机矢量控制(三)——电流环 PI 参数整定(三)
参考文章:https://www.zhihu.com/question/404520965/answer/1381263518