Autoware 1.12学习整理--03--NDT点云定位
〇、前言
在得到点云地图后,接下来为点云定位,是汽车导航的前提,autoware中使用ndt_matching模块完成基于点云的定位,是一种scan-to-map的点云配准算法,本文将使用《Autoware 1.12学习整理–02–构建点云地图》中的点云地图和rosbag数据包完成ndt点云定位。
一、ndt点云定位
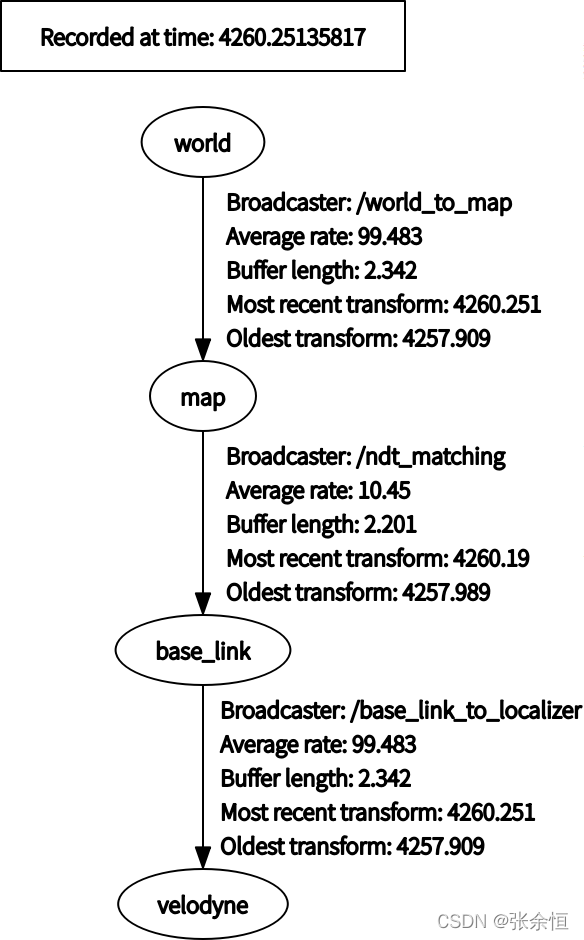
ndt点云定位时的tf树与建图时的稍有不同,从map到base_link的坐标系转换由autoware中的ndt_matching模块完成的,如下图所示:
1.1、加载bag文件
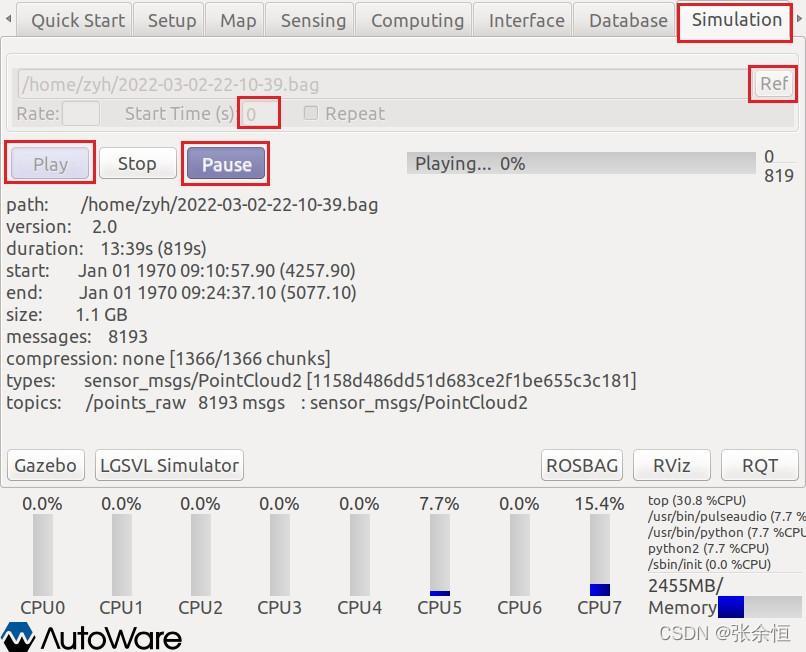
启动autoware,切换到Simulation页面,点击Ref按钮加载bag文件,Start Time设置为0,点击Play然后点击Pause暂停播放,如下图所示。为了保证autoware的正常运行,在启动autoware后首先要做的就是加载bag文件,否则会出现时间戳同步问题。
1.2、完成从base_link到velodyne的坐标系转换
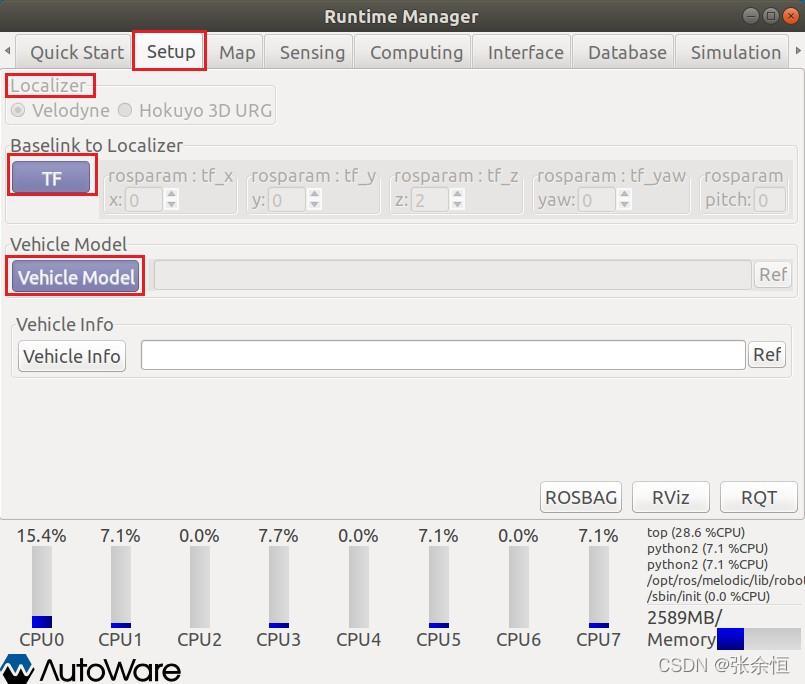
切换到autoware的Setup页面下,确定Localizer选的是Velodyne,设置Baselink to Localizer的x、y、z、yaw、pitch、roll数值,其为雷达中心点与车身后轴中心点的相对位置关系,接着点击TF按钮,最后点击Vehicle Model按钮,如果其后为空,那么会加载一个默认模型。
1.3、完成从world到map的坐标系转换
切换到autoware的Map页面下,点击TF右侧的Ref按钮,加载如下路径的launch文件,其中是从/world坐标系转换到/map坐标系的tf变换,最后点击TF按钮。
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/tf_local.launch
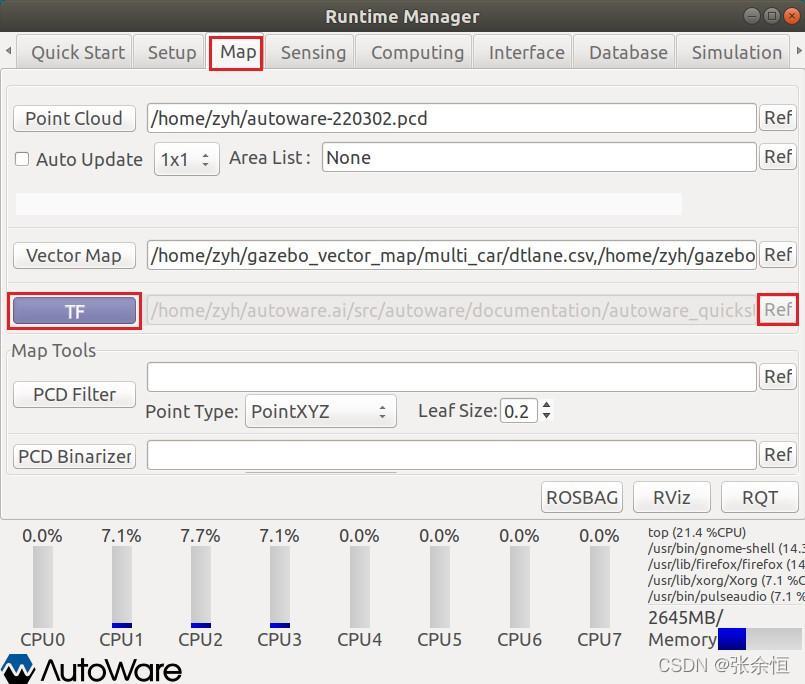
1.4、加载点云地图
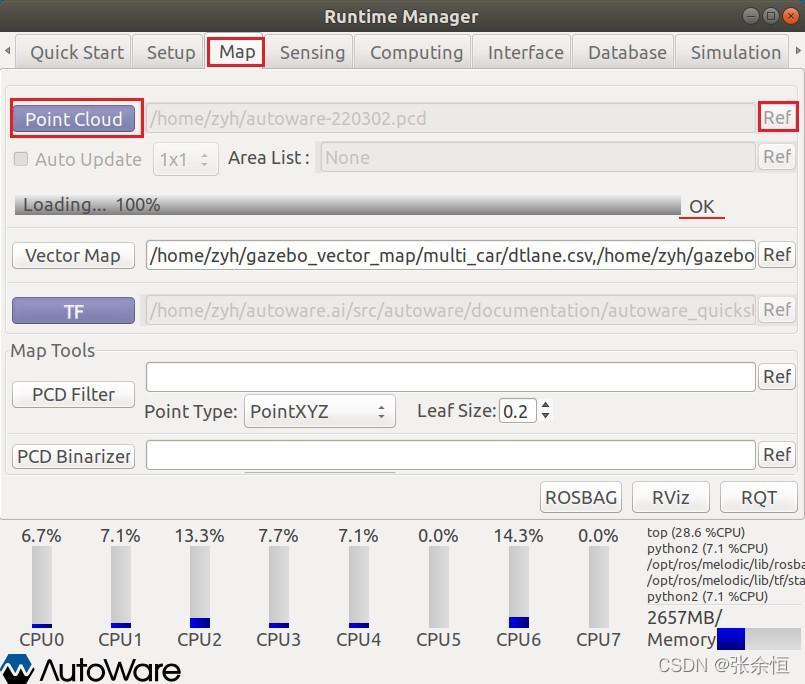
在Map页面下,点击Point Cloud右侧的Ref按钮,加载pcd点云地图,并点击Point Cloud按钮,进度条显示OK,则加载完毕,如下所示:
1.5、点云降采样
voxel_grid_filter,也就是体素滤波,PCL实现的体素滤波VoxelGrid类通过输入的点云数据创建三维体素栅格(可以将体素栅格想象为微小的空间三维立方体的集合),然后在每个体素内,用体素中的所有点的重心近似显示体素中的其他点,这样该体素内所有点就用一个重心点最终表示,然后将所有体素处理后得到过滤后的点云。(这种方法比用体素中心来逼近的方法更慢,但对于采样点对应曲面的表示更为准确。)
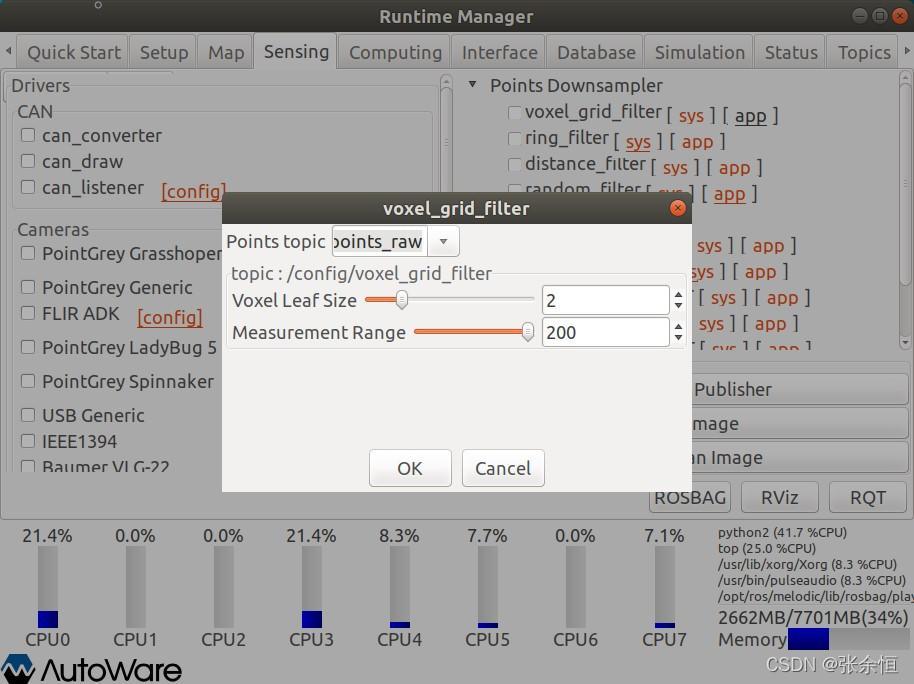
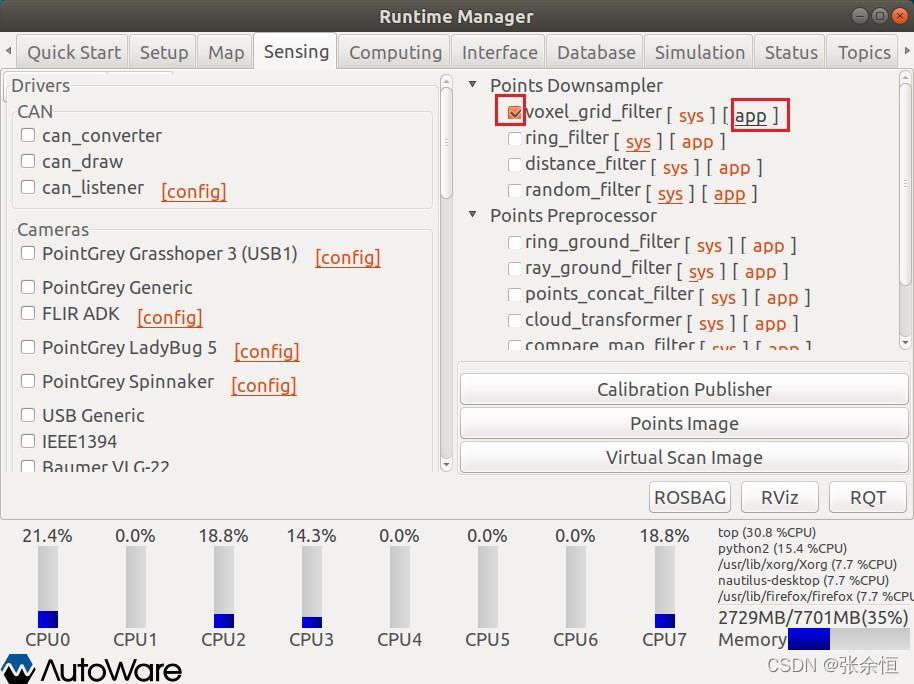
切换到autoware的Sensing页面下,点击Points Downsampler下voxel_grid_filter右侧的app按钮,设置点云话题名Points topic为/points_raw,下面两个参数默认即可,Voxel Leaf Size参数值为2,表示2米的立方体内的全部点近似用1个重心代替,Measurement Range的参数值为200,表示点云的有效的距离是200米。设置完参数后点击OK,最后勾选voxel_grid_filter。
1.6、完成map到base_link的坐标系转换
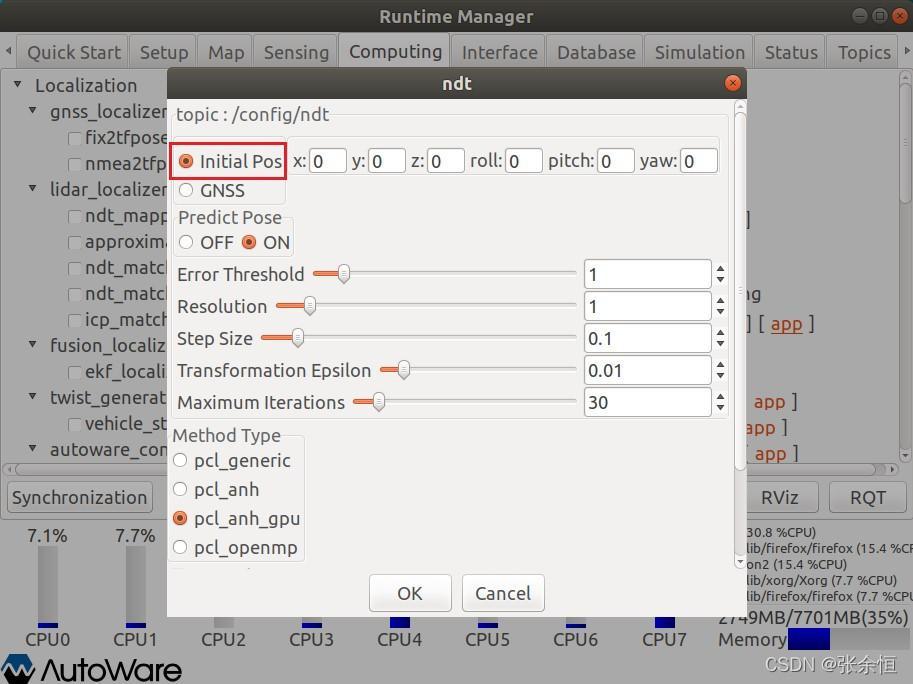
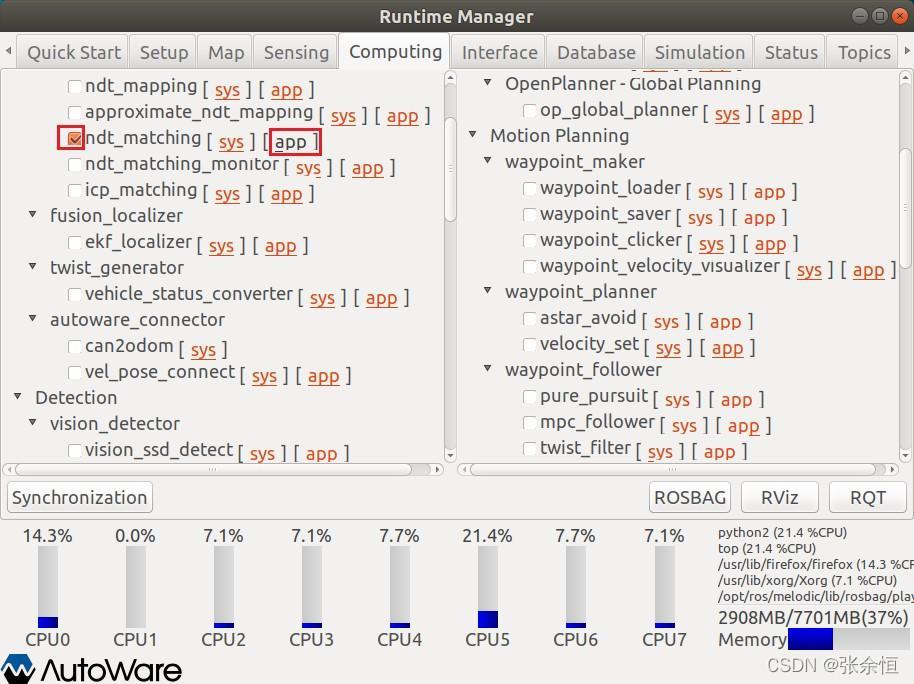
切换到autoware的Computing页面下,点击lidar_localizer下ndt_matching右侧的app按钮,在弹出的页面中topic:/config/ndt选择Initial Pos选项,x,y,z,roll,pitch,yaw的值表示激光数据的初始位姿,如果有GNSS设备可以选择GNSS进行初始定位。Method Type选择pcl_anh_gpu,即使用GPU进行点云匹配计算,然后点击OK,最后勾选ndt_matching。
1.7、播放bag数据
点击autoware界面的RViz按钮,打开rviz,依次点击file->open config加载配置文件:
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz
切回到autoware的Simulation界面,点击Pause按钮开始播放数据,Rviz界面显示如下:
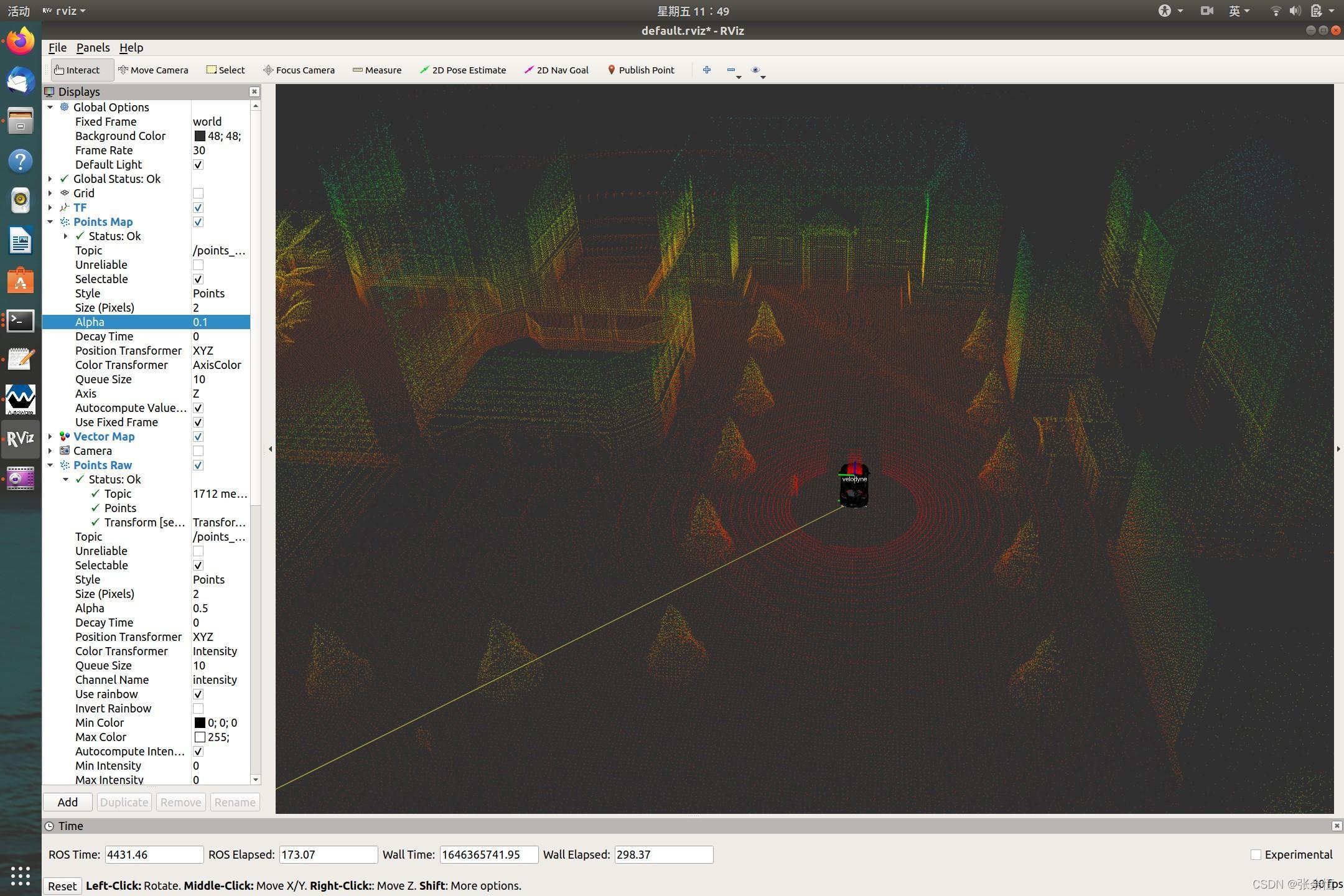
整个运行过程如下:
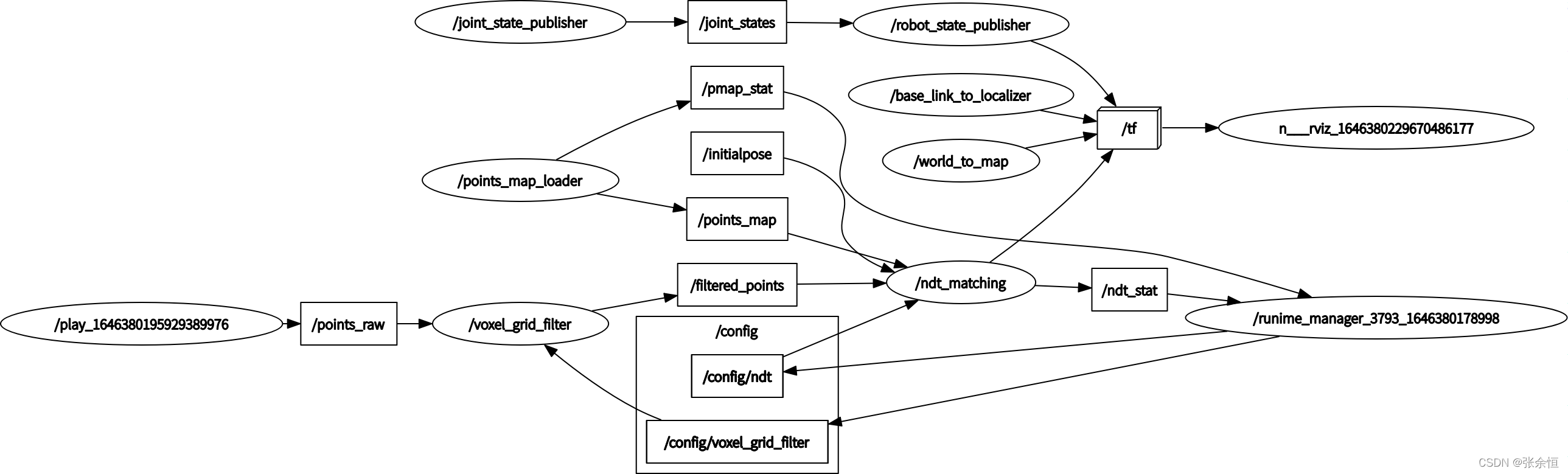
在开始时,没有定位成功,汽车前进了一段距离后突然回到起始位置,此时才定位成功,后面汽车就能一直将点云与地图匹配起来,完成汽车在点云地图中的定位。开始时如果长时间没有定位成功,可以使用rviz中的2D Pose Estimate工具指定汽车的初始位姿。利用ndt_matching进行点云定位时的节点图如下:
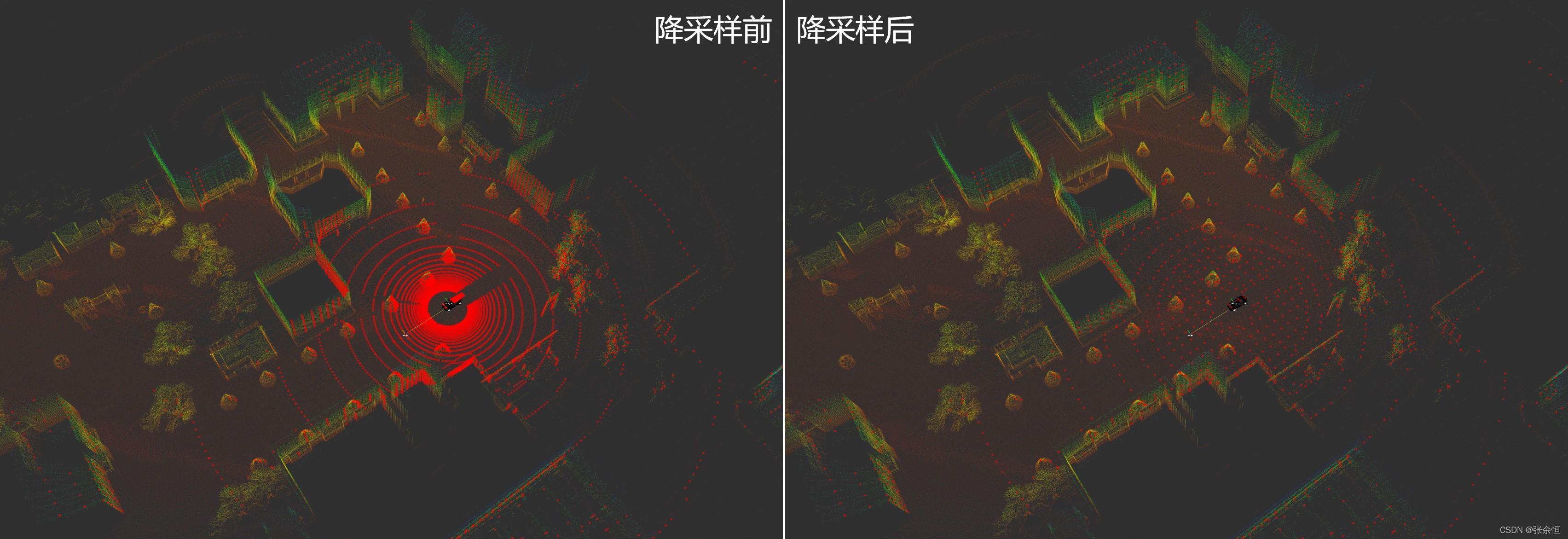
最后可以看一下voxel_grid_filter降采样前后的对比:
文章不妥之处还望指正
参考文章:
https://www.cnblogs.com/hgl0417/p/11143107.html
https://zhuanlan.zhihu.com/p/64226544