ROS实战之重定位——NDT
目录
安装方法
拷贝到工作区,编译,运行,环境依赖同上一篇,Ubuntu16.04+ROS Kinetic+PCL+GTSAM,在运行前将要加载的点云地图放到map目录下,并命名为kaist02.pcd
cd ~/catkin_ws/src
git clone https://github.com/irapkaist/SC-LeGO-LOAM.git
cd …
catkin_make
source devel/setup.bash
roslaunch lego_loam run.launch
和上节一样,播放自己的数据集就可以啦,播放之前在rviz中先发布当前位姿,在起点画一个水平向左的箭头,一定要这样操作。
绘制轨迹
想在重定位结果中绘制出机器人的运动轨迹,需要添加一些代码,用的是nav_msgs/Path这个类型的消息来实现
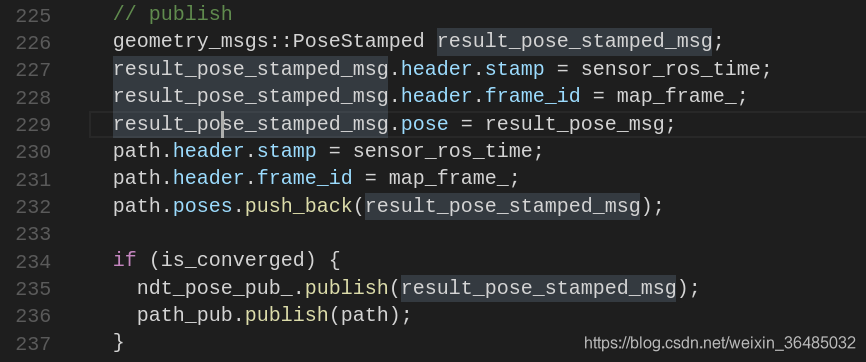 在 [ 你的目录路径 ] /src/ndt_localizer/nodes/ndt.cpp中进行如上图修改,添加的代码是230,231,232,236行,同时要记得在ndt.h头文件中申明变量,如下图所示
在 [ 你的目录路径 ] /src/ndt_localizer/nodes/ndt.cpp中进行如上图修改,添加的代码是230,231,232,236行,同时要记得在ndt.h头文件中申明变量,如下图所示
ros::Publisher path_pub;
在的构造函数中定义变量,构造函数就是NdtLocalizer::NdtLocalizer(ros::NodeHandle &nh, ros::NodeHandle &private_nh):nh_(nh), private_nh_(private_nh), tf2_listener_(tf2_buffer_)
{……},定义如下
path_pub = nh_.advertise<nav_msgs::Path>("trajectory",1, true);
重新编译,运行即可
在rviz中订阅话题,ADD by Topic,选择path即可
结果
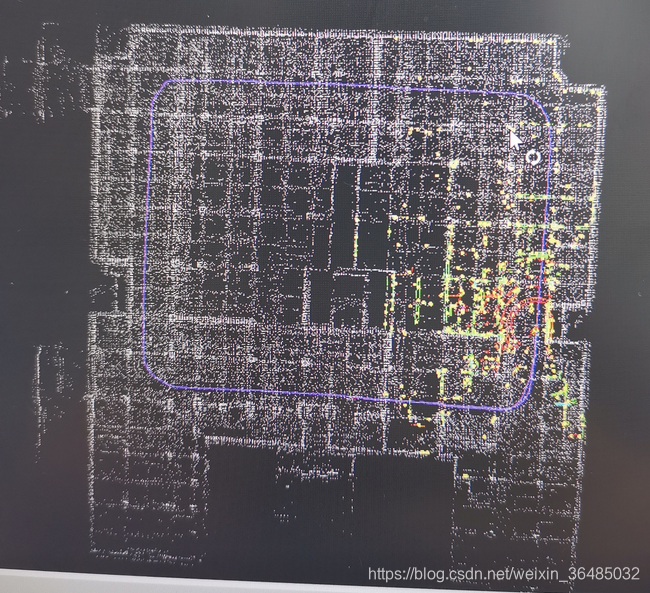 紫色的就是绘制出的机器人运动轨迹了
紫色的就是绘制出的机器人运动轨迹了
参考
https://github.com/AbangLZU/ndt_localizer
https://blog.csdn.net/u013834525/article/details/80447931?utm_source=blogkpcl0