ADAS测试设备—惯性导航系统简介
一、什么是惯性导航系统?
- INS(Inertial Navigation System)惯性导航系统
- GPS(Global Positioning System)全球卫星导航系统
- INS和GPS的区别:INS告诉你有没有移动、GPS告诉你在哪里
打开 GPS 接收器,假设一切正常,在很短的时间后,它将生成位置测量值。接收器生成的位置测量值非常具体,不存在 GPS 的不精确性。它指出“您在这个纬度和这个经度”- 换句话说,它用已知的坐标系提供给我们一个绝对位置。惯性导航系统不能这样工作。就它们而言,它们生成的测量值是相对于他们最后已知的位置。因此,即使在惯性导航系统已经打开几分钟后,它也不能说“您在这个纬度和这个经度”,但它可能会说,“您没有从开始位置移动“。
4.为什么使用INS
惯性导航系统可以计算出它所处的位置与它的起点–因此,如果你告诉INS的起点,它就可以根据自己的测量结果轻松地计算出现在的位置。这就是宇宙飞船、潜艇、飞机和导弹如何使用INS成功导航的原因–因为它们知道自己的起点。
二、INS到底是如何工作的
- INS的组成
惯性导航系统由两个不同的部分组成;第一个是IMU(惯性测量单元),有时也称为IRU(惯性参考单元)。这是提供加速度和角速度测量的加速度计和陀螺仪的总称。第二部分是导航计算机。导航计算机从IMU获取测量数据,并利用这些数据计算INS的相对位置、方向和速度。
- 导航计算机种类
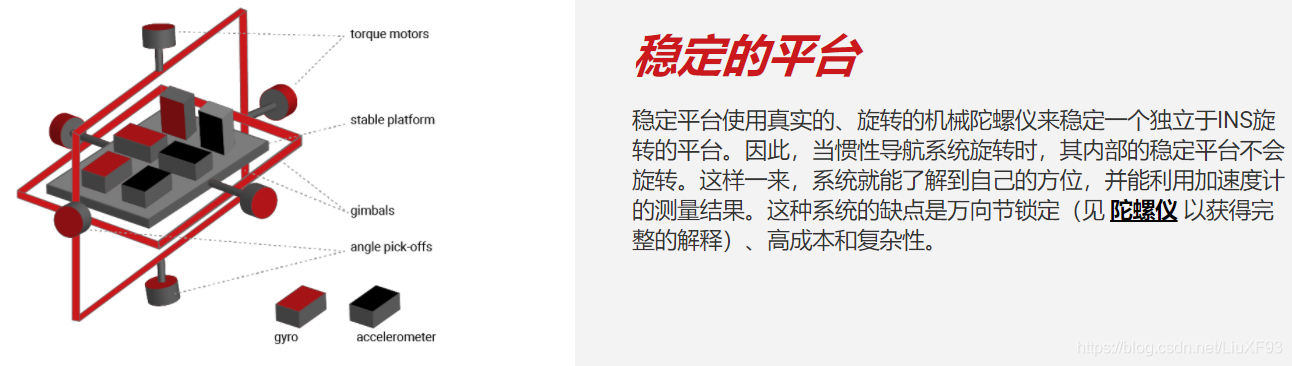
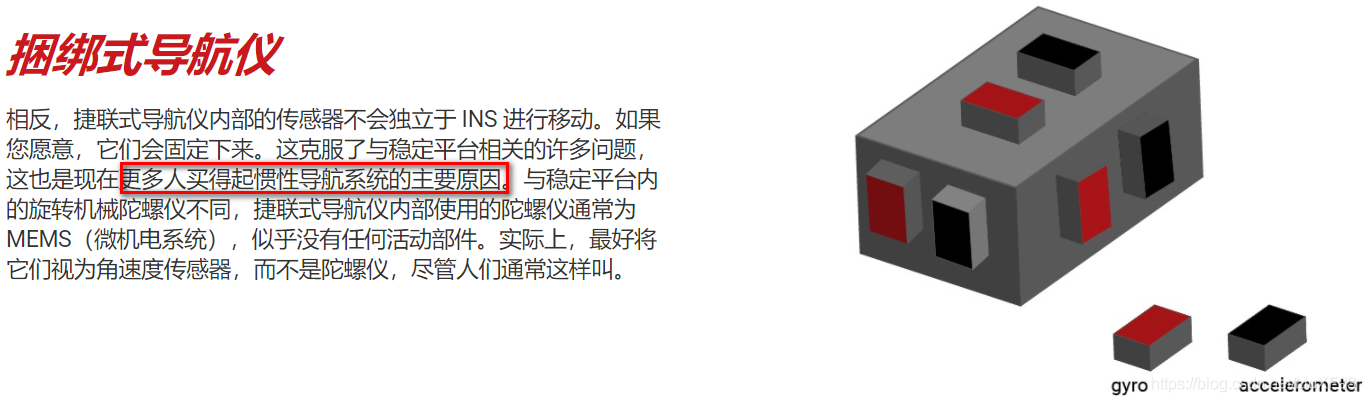
目前使用的导航计算机基本上有两种,一种是稳定平台,一种是绑带式导航仪。
- INS是如何工作的呢?
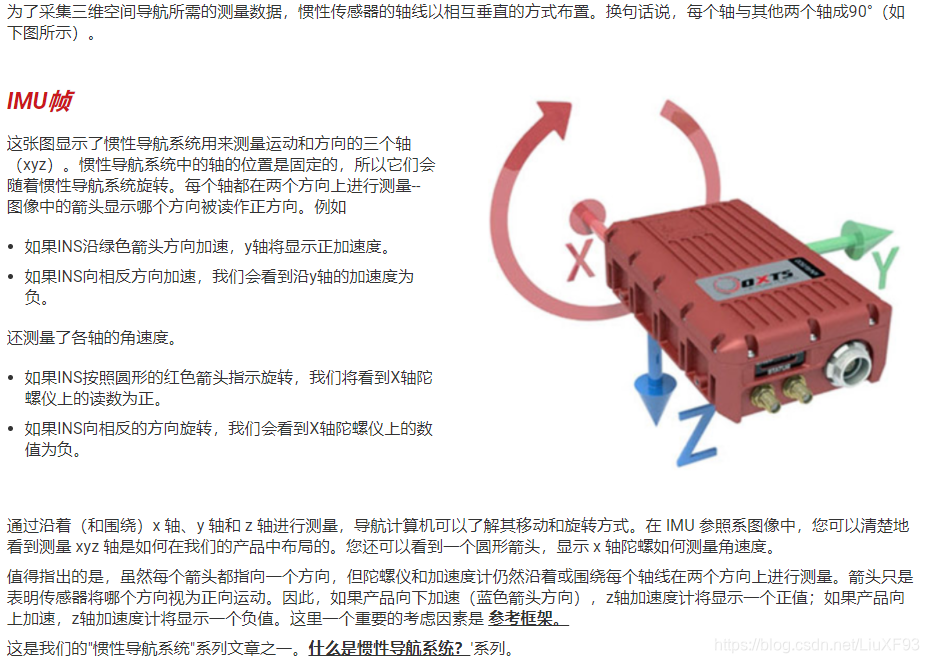
三、参考框架
需要注意IMU放的位置,根据不同的位置需要重新定义坐标的方向。
四、加速度计
- 加速计是大多数惯性导航系统中使用的传感器类型之一。
- 从它们的名字就可以猜到,它们测量的是加速度,而不是速度;可以根据加速度计算速度、位移。
- 加速度计静止时垂向的加速度计的读数为-9.81 m/s²,这是因为加速度计实际测量的是相对于自由落体的加速度
一个自由落体的加速度计,天空中落下时在加速,显示出零加速度。
- 因此,总结一下,加速度计在测量直线运动方面很出色,但在旋转方面就不擅长了,这就是陀螺进来。
五、陀螺仪
- 惯性导航系统大多数惯性导航系统中使用的加速计是测量直线运动的好帮手,但它们不擅长测量旋转运动,这就是陀螺仪的作用。陀螺仪根本不关心直线运动,只关心旋转。
六、死亡计算
- 利用三个加速度计和三个陀螺仪的测量数据,该系统的运行情况如下。OxTS 惯性导航系统追踪它在三维空间中的位置。它使用一种叫做**“死亡计算”**的过程来实现这一目的。
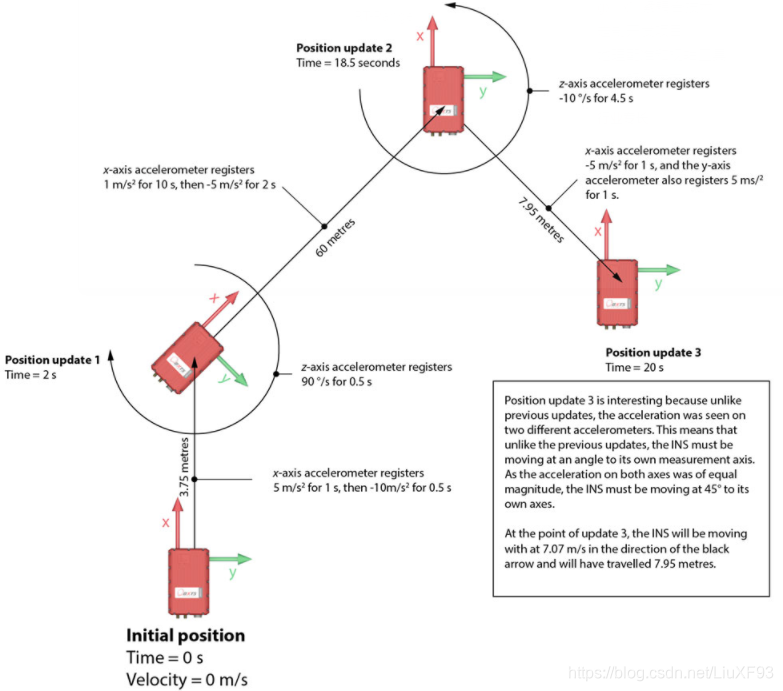
- 您可以看到,INS 最初是静止的,并且与图像成直角对齐,其 x 轴指向上方。然后,图像显示了其他三个位置以及它们之间的传感器记录的信息。当然,实际上,INS 每秒更新其位置数十或数百次,但是在本例中,仅在发生关键变化时才显示位置更新,以便于理解。
- 因此,在时间为零时,INS 是静止的(并且不知道它在哪里)。然后,X 轴加速度计上出现 5 m/s² 的加速度 1 秒,其速度为 5 m/s(或 18 km/h)。随后立即完全停止运行 - 在 0.5 秒内检测到 -10 m/s² 的加速度。由于其他传感器上没有记录其他测量值,因此捷联式导航仪可以轻松地确定它沿 x 轴方向移动了 3.75 米。同样,此时 INS 不知道它在哪里,因为我们没有提供任何位置信息。
- 只要INS停在位置更新1处,z轴陀螺仪就会检测到一个90°/s的值,持续0.5秒;因此它知道它刚刚向顺时针方向转了45°。同样,当该运动完成后,INS再次在X轴加速度计上看到加速度。这次是1米/秒²,持续10秒,然后是-5米/秒²,持续2秒。使用与之前相同的技术,INS 可以计算出它现在已经以 45°角从位置更新 1 时的位置再往前移动了 60 米。这就是前面我们说到INS的位置更新是相对于最后一个已知位置而言的。
最后的移动与之前的移动是不同的。在位置更新2的时候,你可以看到INS已经旋转了,所以它的方向和最初的方向是一样的。然而,当它向位置3移动时,我们可以看到INS现在正与其测量轴(IMU框架)成一定角度移动–它正以135°的方位向后和向右移动。- 由于此运动,同时在 x 轴和 y 轴上录得加速度。也没有引起 INS 停止的负加速度 - 因此,尽管加速度计上的测量值在 1 秒后降为零,但导航计算机知道该装置仍然具有速度。在这种情况下,它以 7.07 m/s(约 25 km/h)的速度运动,位置更新 3 发生在 INS 离开位置更新 2 后 1.5 秒。此时,INS 覆盖了 7.95 米。
- 和所有事物一样,惯性导航也有它的优点和缺点。为了获得最精确的位置、方向和动态测量,其中最重要的一点就是漂移。
七、漂移
当你把INS和GPS结合起来,创建一个GPS辅助INS(也可以写成GPS+INS),你就解决了漂移的问题,也解决了影响GPS的问题。
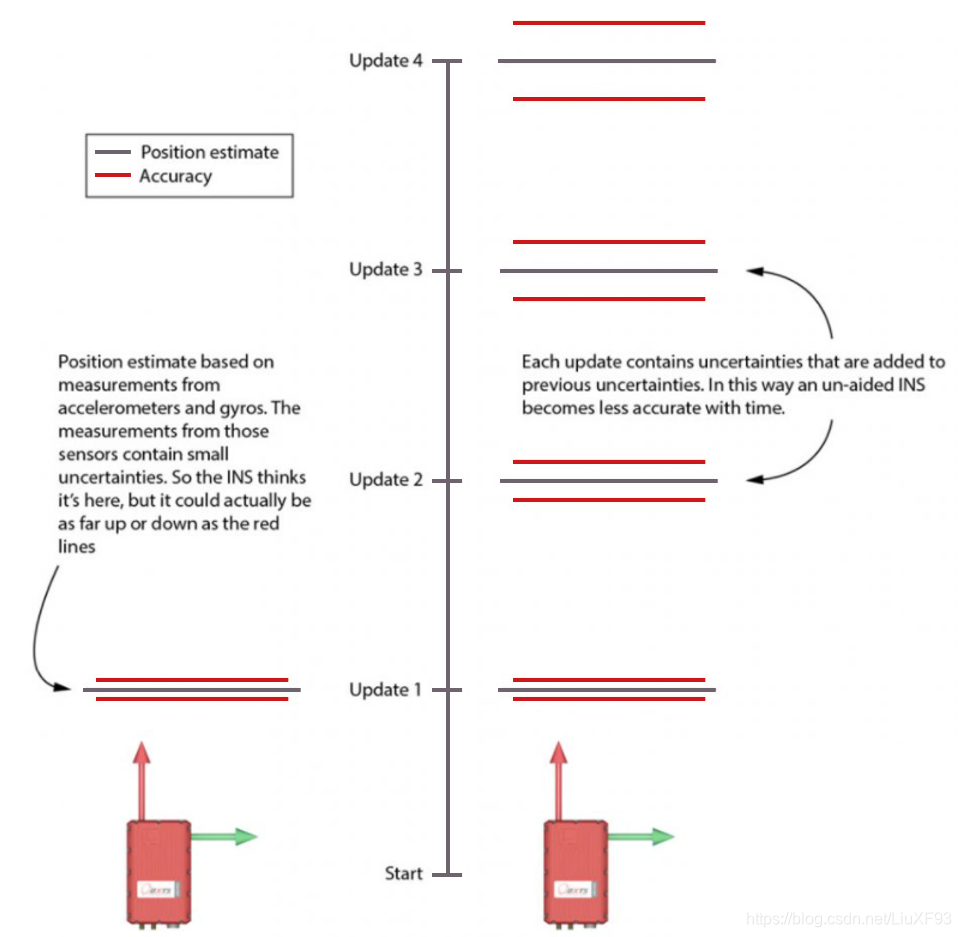
- 虽然 惯性导航系统无疑在测量位置、方向和动态方面很有优势,但基本的无辅助惯性导航系统的一个致命弱点是漂移。无辅助是指只使用加速度计和陀螺仪测量来计算位置的系统。漂移是用来描述加速度计和陀螺仪测量中的小误差积累的术语,这种小误差逐渐导致INS位置估计越来越不准确。
很容易理解为什么发生漂移。想象一下,用一根 5 米长的卷尺测量木材的长度。如果您能以 1 毫米的精度读取卷尺上的刻度,则很容易说出这根木材长 4 米 ± 1 毫米。另一方面,如果您只能找到 0.5 米长的卷尺,而您仍然只能以 1 毫米的精度读取它,那么在完成测量并与卷尺一起移动 8 次时,您只能说该木材长 4 米 ± 8 毫米。实际上,您可能根本不会量到 4 m 长。
INS 中的漂移以相同的方式累积。每次读取加速度计或陀螺仪时,读数都会出现微小的误差。如果我们只读取一个读数就可以得出我们加速或转弯的速度,那么这将不是问题。但是,由于导航计算机正在对每个测量结果进行累加,以计算出它是如何从之前的位置估计值移动的,因此微小的误差会随着时间推移而增加。