【机器人控制 Robot Control】点对点控制 P2P Control 和 路径控制 Path Control【新加坡南洋理工大学 NTU Singapore】
The Control Problem (In General)
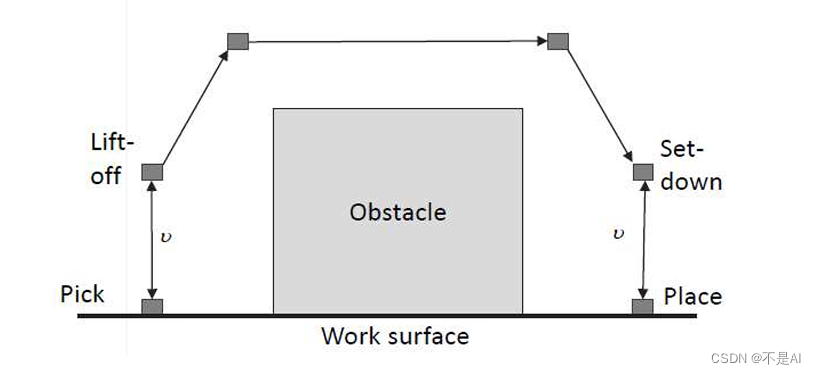
Point-to-Point (P2P) Control
Definition: To move the robot from an initial position to some desired final position.
Example: The Pick & Place Problem


Graphic Illustration:
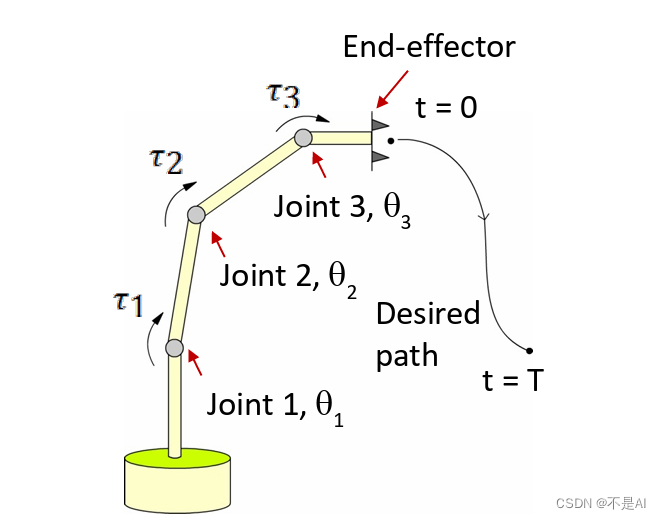
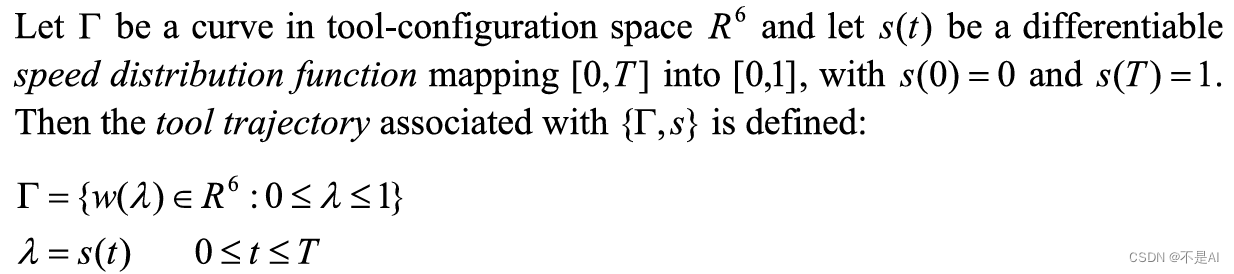
Path Control (or, Continuous-Path Motion Control)
Definition: Specifying the desired path or trajectory.
Tool Trajectory:
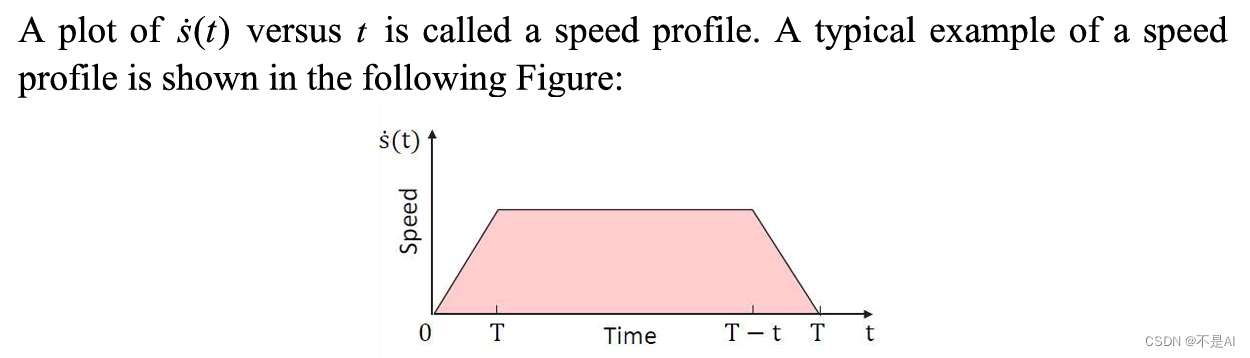
Example (Speed Profile):