opencv入门
目录
窗口显示
cv::imshow
void cv::imshow ( const String & winname,InputArray mat);
- imshow根据窗口名称显示图像到指定的窗口上去,第一个参数是窗口名称第二参数是Mat对象
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
cv::Mat src = imread("C:/Users/26961/Desktop/dog.jpg");
if (src.empty()) {
cout << "图图片未加载" << endl;
return -1;
}
imshow("输入窗口", src);
waitKey(0); //阻塞式等待
destroyAllWindows(); //销毁所有的窗口对象
return 0;
}
并不能进行窗口的缩放,只是图片固定在创建的窗口上会固定尺寸
注意:
- imread可以加载灰度图像
cv::imread
imread(const string& filename, int flags=1);
- imread功能是加载图像文件成为一个Mat对象,其中第一个参数表示图像文件名称。
- 第二个参数,表示加载的图像是什么类型,支持常见的三个参数值
IMREAD_ UNCHANGED (<0)表示加载原图,不做任何改变
IMREAD_GRAYSCALE ( 0)表示把原图作为灰度图像加载进来
IMREAD_ COLOR (>0)表示把原图作为RGB图像加载进来
注意: OpenCV支持JPG、PNG、 TIFF等常 见格式图像文件加载
cv::Mat src = imread("C:/Users/26961/Desktop/dog.jpg",
IMREAD_GRAYSCALE);
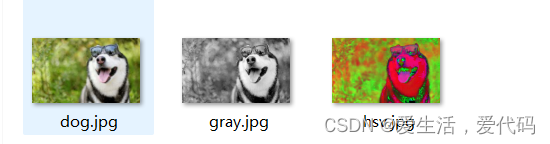
显示效果:

cv::namedWindow
namedWindos功能是创建一个OpenCV窗口 ,它是由OpenCV自动创建与释放,你无需取销毁它。
//常见用法
namedWindow("Window Title", WINDOW_ AUTOSIZE)
- WINDOW_ AUTOSIZE会自动根据图像大小,显示窗门大小,不能认为改变窗口大小。
- WINDOW_ NORMAL,跟QT集成的时候会使用,允许修改窗口大小。
- WINDOW_FREERATIO, 可以调整图片的自由比率。
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
cv::Mat src = imread("C:/Users/26961/Desktop/dog.jpg");
if (src.empty()) {
cout << "图片未加载" << endl;
return -1;
}
//可以进行窗口的缩放
namedWindow("输入窗口", WINDOW_FREERATIO); //WINDOW_FREERATIO -可以调整图片的自由比率
imshow("输入窗口", src);
waitKey(0);//阻塞式等待
destroyAllWindows();
return 0;
}
cv::cvtColor
void cv::cvtColor(InputArray src, //输入图像
OutputArray dst, //输出图像
int code, //目标色彩空间, 如COLOR_BGR2GRAY 等
int dstCn = 0
)
cvtColor的功能是把图像从一-个彩色空间转换到另外一个色彩空间,有三个参数,第一个参数表示源图像、第二参数表示色彩空间转换之后的图像、第三个参数表示源和目标色彩空间如:
COLOR_BGR2GRAY = 6彩色到灰度
COLOR_GRAY2BGR= 8灰度到彩色
COLOR_BGR2HSV = 40 BGR到HSV
COLOR_HSV2BGR = 54 HSV到BGR
cv::imwrite
CV_EXPORTS_W bool imwrite( const String& filename, InputArray img,
const std::vector<int>& params = std::vector<int>());
-
保存图像文件到指定目录路径
-
只有8位、16位的PNG、 JPG、 Tiff文件格式而 且是单通道或者三通道的BGR的图像才可以通过这种方式保存。
-
保存PNG格式的时候可以保存透明通道的图片可以指定压缩参数
void QuickDemo::quick_space_demo(Mat& src)
{
Mat gray, hsv; //用于存储灰色和彩色的Mat对象
cvtColor(src, hsv, COLOR_BGR2HSV); //设置灰色
cvtColor(src, gray, COLOR_BGR2GRAY); //设置彩色
//调整图片的自由比率
namedWindow("灰色", WINDOW_FREERATIO);
namedWindow("hsv", WINDOW_FREERATIO);
imshow("hsv", hsv); //显示转换后的图片
imshow("灰色", gray); //显示转换后的图片
//保存转换颜色后的图片
imwrite("C:/Users/26961/Desktop/images/hsv.jpg", hsv);
imwrite("C:/Users/26961/Desktop/images/gray.jpg", gray);
}
main.cpp
#include <opencv2/opencv.hpp>
#include <iostream>
#include "quick_demo.h"
using namespace cv;
using namespace std;
int main()
{
cv::Mat src = imread("C:\\Users\\26961\\Desktop\\images\\dog.jpg");
if (src.empty()) {
cout << "图片未打开" << endl;
return -1;
}
//可以进行窗口的缩放,图片与窗口大小匹配
namedWindow("输入窗口", WINDOW_FREERATIO);
imshow("输入窗口", src);
//彩色转换
QuickDemo obj;
obj.quick_space_demo(src);
//将Mat 对象传递给quick_space_demo函数,将转换的图片保存到
// C:/Users/26961/Desktop/images/路径中
//阻塞等待
waitKey(0);
//销毁窗口对象
destroyAllWindows();
return 0;
}
openCV图像对象创建与赋值
图像对象的创建和赋值
void QuickDemo::mat_creater_demo(Mat& src)
{
Mat m1, m2;
m1 = src.clone(); //赋值方式一
src.copyTo(m2); //赋值方式二
cvtColor(src, m1, COLOR_BGR2HSV); //为了区别,将m1对象色彩设置为彩色
imshow("m1对象", m1);
imshow("m2对象", m2);
}
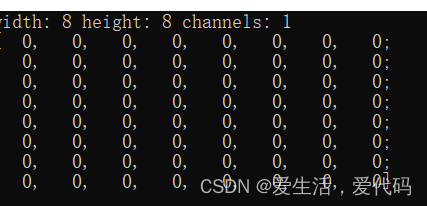
创建 8 * 8 的空白对象
//设置8 * 8的空白图像,指定一个通道。
Mat m3 = Mat::zeros(Size(8, 8), CV_8UC1);
/*
显示宽度、高度、通道。
*/
std::cout << "width: " << m3.cols << " height: " << m3.rows
<< " channels: " << m3.channels() << std::endl;
//打印空白图像
std::cout << m3 << std::endl;
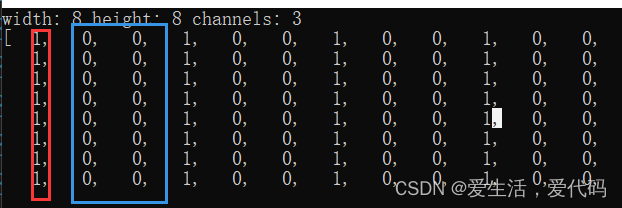
使用ones和zeros的区别
如果在创建空白Mat对象时,如果指定要创建3个通道的时候,但是此时是使用Mat::ones该方法进行创建的话都出现1和0交替的现象,并且1总是出现在1通道
Mat m3 = Mat::ones(Size(8, 8), CV_8UC3);
std::cout << "width: " << m3.cols << " height: " << m3.rows
<< " channels: " << m3.channels() << std::endl;
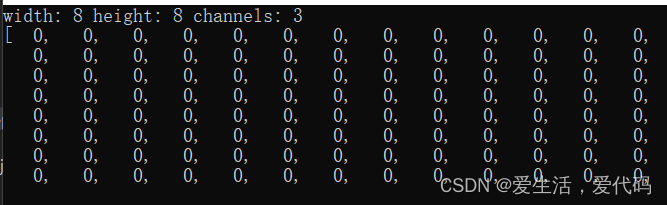
而如果是使用Mat::zeros方法时,并不会发送该情况,而是全部会初始化为0。
Mat m3 = Mat::zeros(Size(8, 8), CV_8UC3);
改变空白对象的色彩
Mat m3 = Mat::zeros(Size(500, 500), CV_8UC3);
m3 = Scalar(255,0,0); //设置m3对象的色彩,这里会被设置为纯蓝色
imshow("图像", m3); //显示m3对象
Mat对象之间的深浅拷贝问题
void QuickDemo::mat_creater_demo(Mat& src)
{
Mat m1, m2;
m1 = src.clone(); //赋值方式一
src.copyTo(m2); //赋值方式二
cvtColor(src, m1, COLOR_BGR2HSV); //为了区别,将m1对象色彩设置为彩色
/*imshow("m1对象", m1);
imshow("m2对象", m2);*/
Mat m3 = Mat::zeros(Size(500, 500), CV_8UC3);
m3 = Scalar(255,0,0); //设置m3对象的色彩
imshow("图像3", m3);
std::cout << "width: " << m3.cols << " height: " << m3.rows
<< " channels: " << m3.channels() << std::endl;
//浅拷贝
Mat m4 = m3;
m4 = Scalar(0, 0 ,0); //修改了m3
imshow("图像4", m4);
//深拷贝
Mat m5 = m3.clone(); //深拷贝已经修改了的m3
imshow("图像5", m5);
}
如果只是单纯的进行浅拷贝的话,那么m4对象的改变会影响到m3对象, 直到m4被修改了后m3也会收到影响。
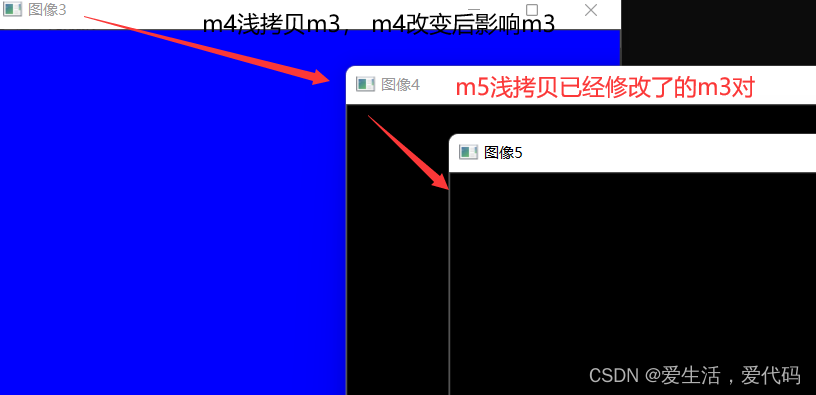
解决的方案就是让m4深拷贝m3,那么就不会导致m3发生改变
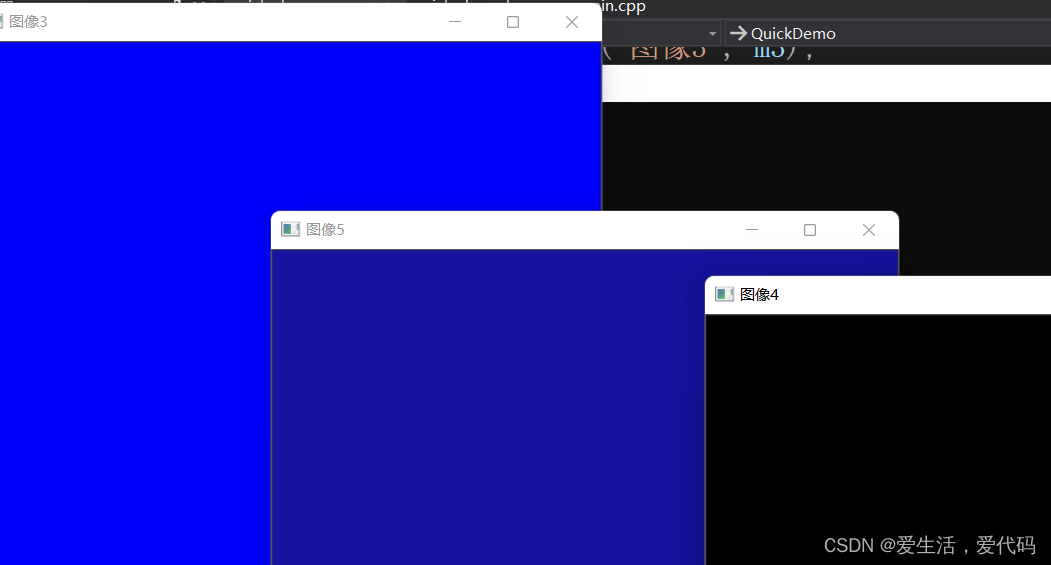
void QuickDemo::mat_creater_demo(Mat& src)
{
Mat m3 = Mat::zeros(Size(500, 500), CV_8UC3);
m3 = Scalar(255,0,0); //设置m3对象的色彩
imshow("图像3", m3);
std::cout << "width: " << m3.cols << " height: " << m3.rows
<< " channels: " << m3.channels() << std::endl;
//浅拷贝
Mat m4 = m3.clone();
m4 = Scalar(0, 0 ,0);
imshow("图像4", m4);
//深拷贝
Mat m5 = m3.clone();
m5 = Scalar(160,20,20);
imshow("图像5", m5);
}
效果:
opencv图像像素点读写操作
读一个GRAY像素点的值(CV_8UC1)
- 注:单通道
Scalar intensity = img.at<uchar> (x, y); //第一种
Scalar intensity = img.at<uchar> (Point(x, y)); //第二种
读一个RGB像素点的像素值, B、G、R读取顺序
- 注:三通道
Vec3f intensity = img.at<Vec3f>(x,y);
double blue = intensity.val[0];
double green = intensity.val[1];
double red = intensity.val[2];
数组遍历
- CV Assert(mylmage.depth()==CV 8U);
void changeimg(Mat &src) {
int w = src.cols; //列
int h = src.rows; //行
int dims = src.channels(); //通道
for (int i = 0; i < h; i++) {
for (int j = 0; j < w; j++) {
if (dims == 1) { //单通道的灰度图像
//获取[i, j]位置的像素值
int pv = src.at<uchar>(i, j);
//修改[i, j]位置的像素值
src.at<uchar>(i, j) = 255 - pv;
}
//三个通道的像素点需要修改三次,因为三个通道的彩色图像每一个像素点可以存储3个值
if (dims == 3) { //3通道的彩色图像
//Vec3b 是一个三通道的像素点,所以Vec3b对象包含三个值
Vec3b bgr = src.at<Vec3b>(i, j);
src.at<Vec3b>(i, j)[0] = 255 - bgr[0];
src.at<Vec3b>(i, j)[1] = 255 - bgr[1];
src.at<Vec3b>(i, j)[2] = 255 - bgr[2];
}
}
}
}
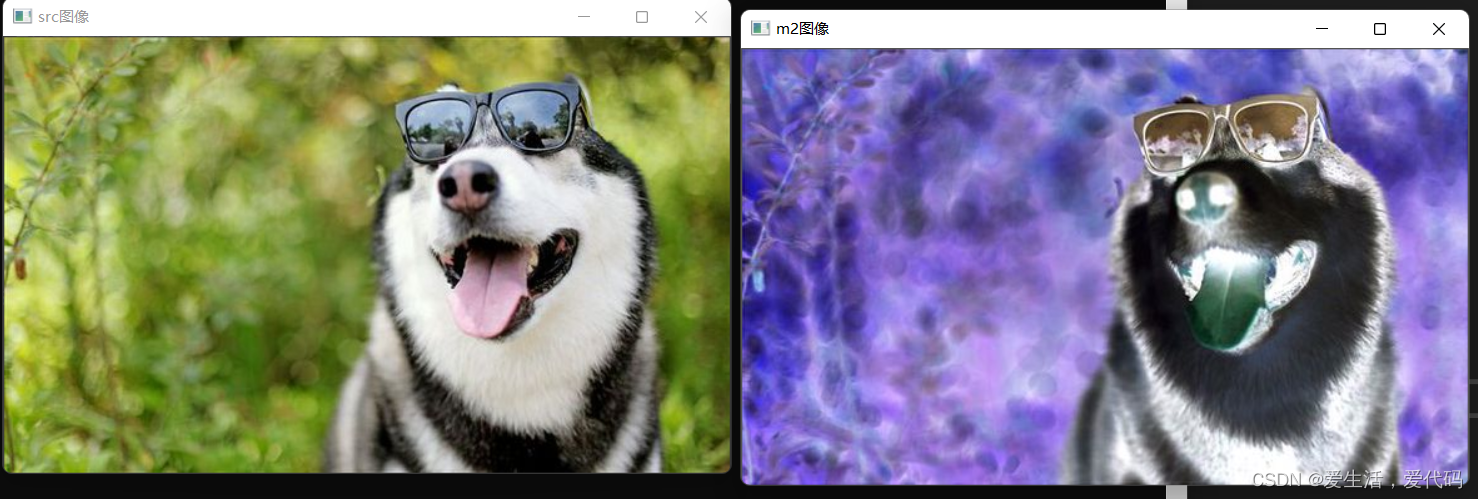
void QuickDemo::pixel_vlist_demo(Mat& src) {
Mat m1 = src.clone();
changeimg(m1);
imshow("src图像", src);
Mat m2 = src.clone();
changeimg(m2);
imshow("m2图像", m2);
}
修改前 vs 修改后
指针方式遍历
- Mat.ptr< uchar >(int i=0) 获取像素矩阵的指针,索弓li表示第几行,从开始计行数。
- 获得当前行指针 const uchar* current=mylmage.ptr(row );
- 获取当前像素点 P(row, col)的像素值p(row, col) =current[col]
void changeimg2(Mat& src) {
int w = src.cols; //列
int h = src.rows; //行
int dims = src.channels(); //通道
for (int i = 0; i < h; i++) {
// 获取行指针
uchar* curr_row = src.ptr<uchar>(i);
for (int j = 0; j < w; j++) {
//获取列指针
if (dims == 1) {
int pv = *curr_row;
*curr_row++ = 255 - pv;
}
if (dims == 3) {
//遍历一个像素点拥有三个值的图像
*curr_row++ = 255 - *curr_row;
*curr_row++ = 255 - *curr_row;
*curr_row++ = 255 - *curr_row;
}
}
}
}
void QuickDemo::pixel_vlist_demo(Mat& src) {
Mat m1 = src.clone();
changeimg1(m1);
imshow("src图像", m1);
Mat m2 = src.clone();
changeimg2(m2);
imshow("m2图像", m2);
}
像素范围处理saturate_cast < uchar >
- 这个函数的功能是确保RGB值得范围在0~255之间
saturate_cast < uchar > ( -100 ),返回0。
saturate_cast < uchar > ( 288 ),返回255
saturate_cast < uchar > ( 100 ) , 返回100
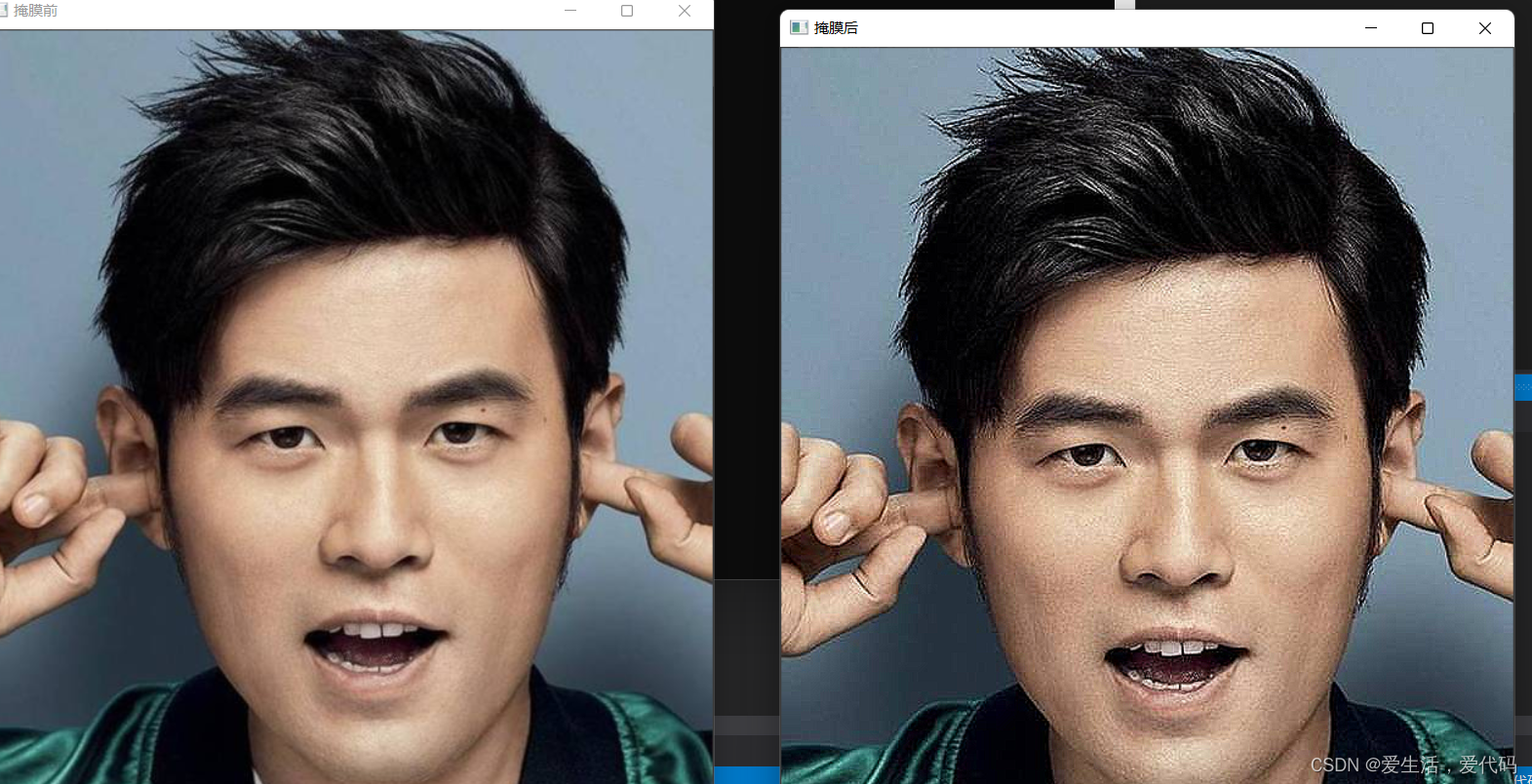
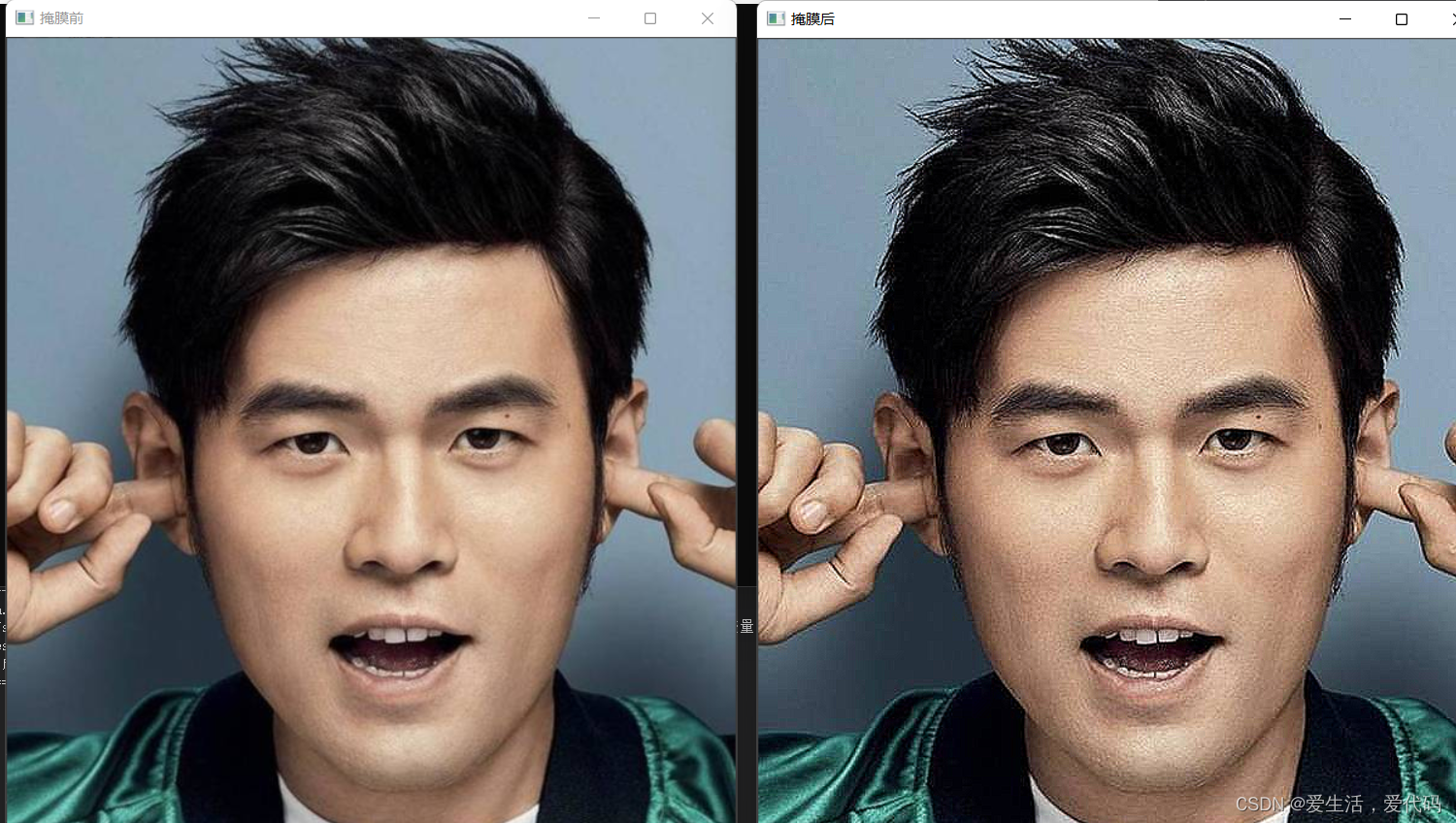
图像掩膜操作
红色是中心像素,从上到下,
从左到右对每个像素做同样
的处理操作。得到最终结果
就是对比度提高之后的输出
图像Mat对象。

- 矩阵的掩膜操作十分简单,根据掩膜来重新计算每个像素的像素值,掩膜(mask 也被称为Kernel)
- 通过掩膜操作实现图像对比度提高。
//x: 通道数
I(i, j) = 5 * I(i, j) - [I(i -x,j) + I(i + x,j) + I(i, j - x) + I(i, j + x)]
// 当前点 上 下 左 右
掩膜操作代码
void Test_Demo::maskopt(cv::Mat &src, cv::Mat *outsrc)
{
//存放目标答案
cv::Mat dst = cv::Mat::zeros(src.size(), src.type());
//获取宽高
int row = src.rows; //行
int col = (src.cols - 1) * src.channels(); //列
//获取偏移量
int offset = src.channels();
for (int i = 1; i < row - 1; i++) {
const uchar* prevptr = src.ptr<uchar>(i - 1);
const uchar* currptr = src.ptr<uchar>(i);
const uchar* nextptr = src.ptr<uchar>(i + 1);
uchar* dst_ptr = dst.ptr<uchar>(i);
for (int j = offset; j < col; j++) {
//[I(i - 1, j) + I(i + 1, j) + I(i, j - 1) + I(i, j + 1)]
dst_ptr[j] = saturate_cast<uchar> ((5 * currptr[j]) - (currptr[j - offset]
+ currptr[j + offset] + prevptr[j] + nextptr[j]));
}
}
*outsrc = dst.clone();
}
void test_demo_func()
{
cv::String filename = "C:/Users/26961/Desktop/images/jay.jpg";
Test_Demo obj;
cv::Mat src = cv::imread(filename);
cv::Mat dst;
obj.maskopt(src, &dst);
cv::namedWindow("掩膜前");
imshow("掩膜前", src);
cv::namedWindow("掩膜后");
imshow("掩膜后", dst);
}
掩膜操作前后对比
使用cv::filter2D 对图像进行掩膜处理
定义掩膜:
Mat kernel= (Mat_ <char>(3,3)<<0, -1,0, -1,5,-1,0,-1, 0);
filter2D( src, dst, src.depth(), kernel);
- 其中src与dst是Mat类型变量、
- src.depth表示位图深度 ,有32、24、8等。
- kernel需要人为的去定义一个掩膜
使用filter2D的效果
void test_demo_func()
{
cv::String filename = "C:/Users/26961/Desktop/images/jay.jpg";
Test_Demo obj;
cv::Mat src = cv::imread(filename);
cv::Mat dst;
//obj.maskopt(src, &dst);
Mat kernel = (Mat_ <char>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);
filter2D(src, dst, src.depth(), kernel);
cv::namedWindow("掩膜前");
imshow("掩膜前", src);
cv::namedWindow("掩膜后");
imshow("掩膜后", dst);
}
图像像素的算术操作
除法操作两种方式
void QuickDemo::operator_demo(Mat& src)
{
Mat dst;
dst = src / Scalar(2, 2, 2);
imshow("算术操作", dst);
}
void QuickDemo::operator_demo(Mat& src)
{
Mat dst;
Mat m = Mat::zeros(src.size(), src.type());
m = Scalar(2, 2, 2);
divide(src, m, dst);
imshow("除法操作", dst);
}
乘法操作
void QuickDemo::operator_demo(Mat& src)
{
Mat dst;
Mat m = Mat::zeros(src.size(), src.type());
m = Scalar(2, 2, 2);
multiply(src, m, dst); //src 与 m相乘的结果放入dst中
imshow("算术操作", dst);
}
像素点相加
void QuickDemo::operator_demo(Mat& src)
{
//初始化dst, 用于存储m和src 运算后的结果值
Mat dst = Mat::zeros(src.size(), src.type());
//初始化m对象
Mat m = Mat::zeros(src.size(), src.type());
m = Scalar(2, 2, 2);
int h = src.rows; //获取行
int w = src.cols; //获取列
//计算 m对象和src的和值
for (int i = 0; i < h; i++) {
for (int j = 0; j < w; j++) {
Vec3b p1 = src.at<Vec3b>(i, j);
Vec3b p2 = m.at<Vec3b>(i, j);
dst.at<Vec3b>(i, j)[0] = saturate_cast<uchar>(p1[0] + p2[0]);
dst.at<Vec3b>(i, j)[1] = saturate_cast<uchar>(p1[1] + p2[1]);
dst.at<Vec3b>(i, j)[2] = saturate_cast<uchar>(p1[2] + p2[2]);
}
}
imshow("算术操作", dst);
}
算术运算常用的四个接口
//加法
void add(src, m, dst);
//减法
void subtract(src, m, dst);
//乘法
void multiply(src, m, dst);
//除法
void divide(src, m, dst);
