NEO-M8T+千寻基站+RTKNAVI进行RTK定位
利用NEO-M8T和千寻基站,利用RTKLIB进行RTK定位
最近在研究RTK的实时定位,打算使用RTKLIB的GUI软件rtknavi进行实时定位。拟采用u-blox公司的单频接收机NEO-M8T和千寻网络基站来实现RTK定位
1.NEO-M8T的配置
一般初试情况下原厂配置就是移动站模式,在这里详细介绍了如果配置为移动站接收机。
1.使用u-center软件时请先检查驱动是否安装完成(如CH340/PL2303),后连接数据线等。
2.打开u-center软件,在左上角选择正确的串口及波特率,一般NE0-M8T默认波特率为9600.
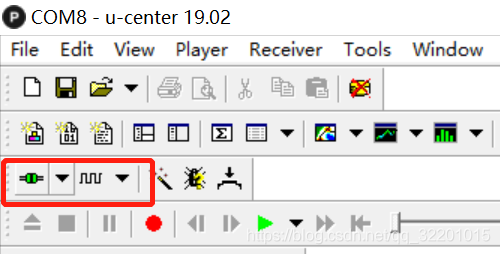
3.在View处点击Message View,依次进行如下设置并点击sent,在PRT和RATE出可以分别对接收机的波特率和发送信息的频率进行设置。频率设置为57600,输出设置为UBX+NMEA格式,设置结束点击sent。

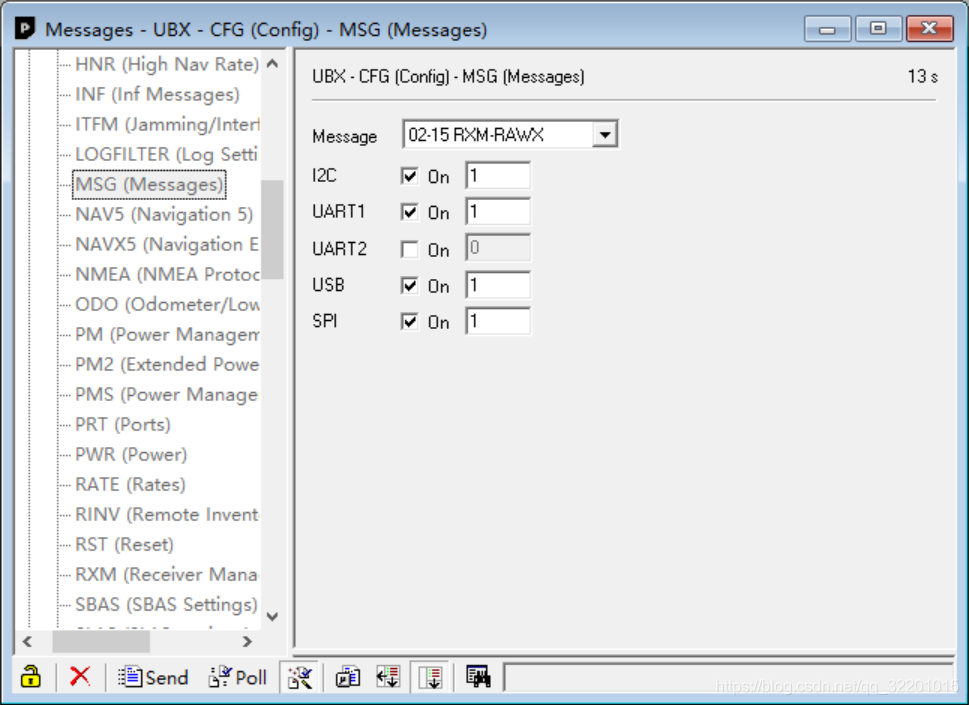
4.之后再对message进行配置,点击send,将RXM信息都输出出来,主要是RXM-RAWX(观测值),RXM-SFRBX(星历),(SIVI和MEASX也可输出)
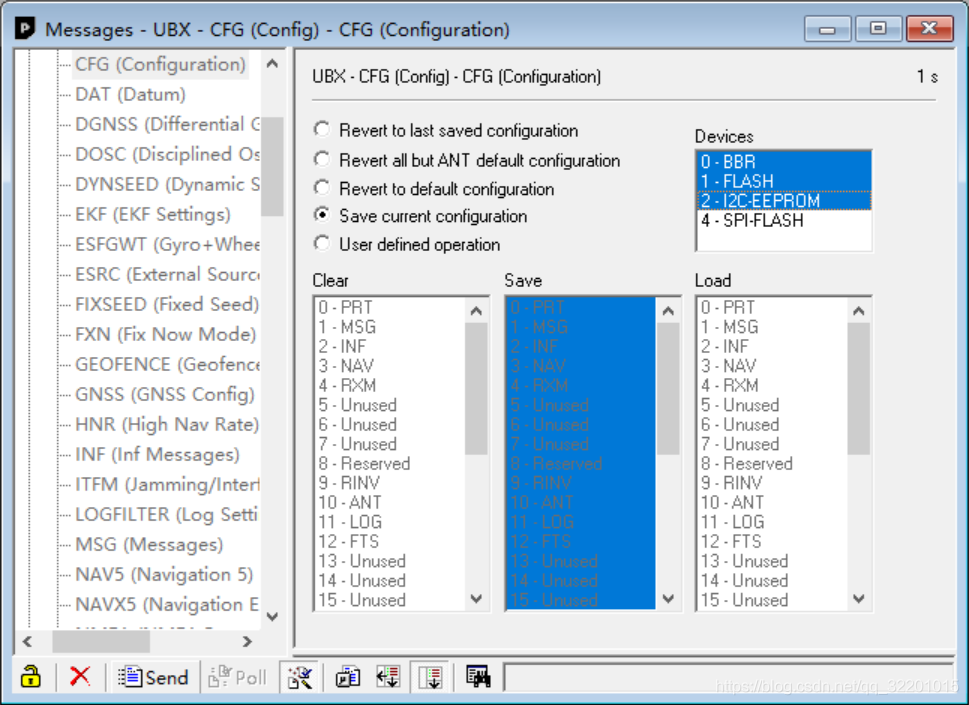
5.配置完上述步骤之后点击CFG点击sent进行配置的保存以便在下次重启时生效
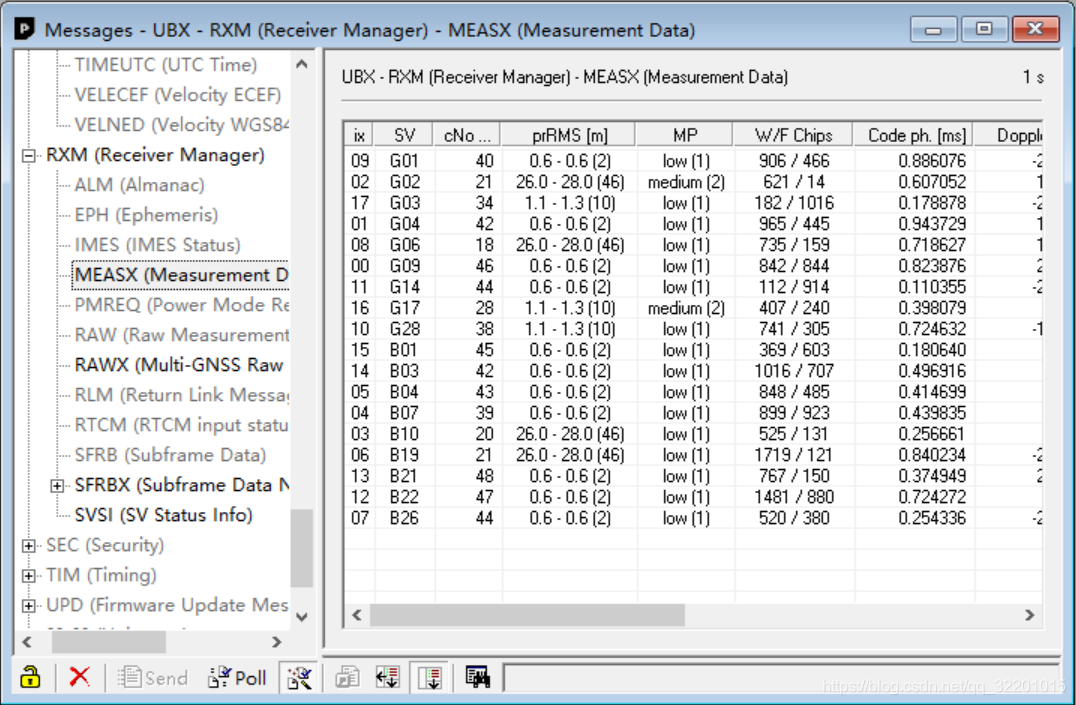
配置完成后可以在界面看到RXM数据已经出现:
2.rtknavi配置
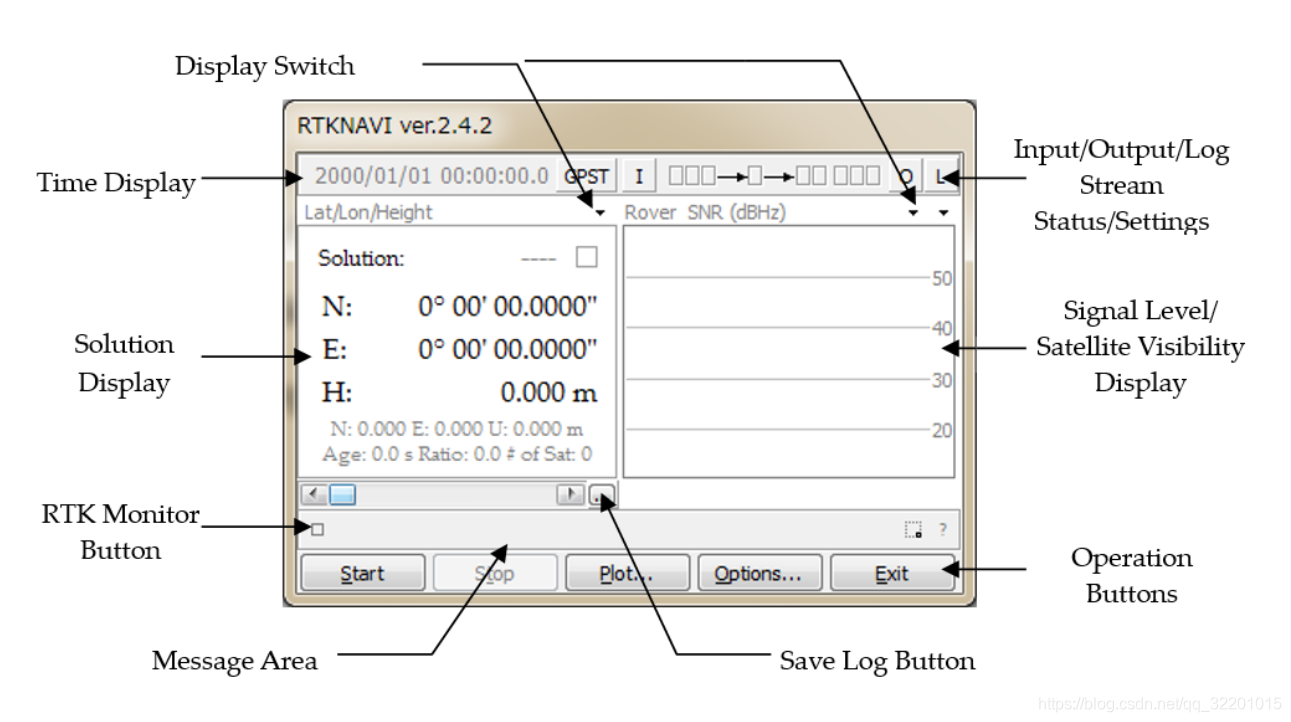
rtknavi是RTKLIB中用于实时定位的GUI,他可以实时进行单点定位和RTK定位。下图是他的基本界面和功能:
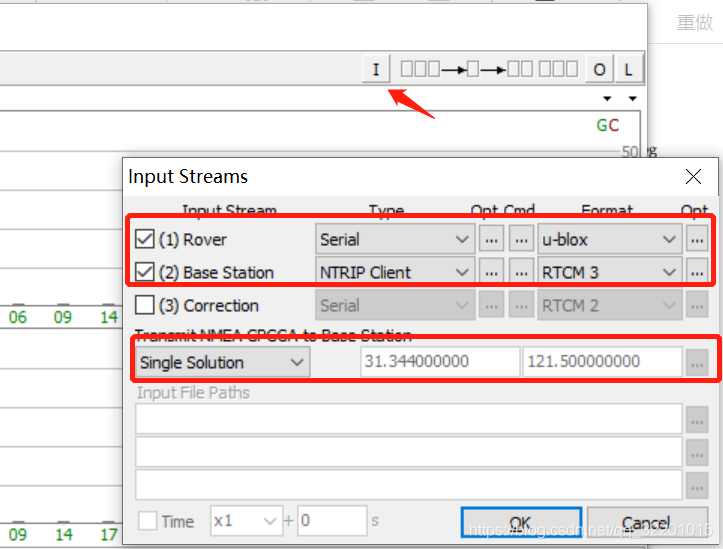
1.勾选Rover和Base Station。
点击
I
I
I,打开input stream的配置界面进行配置。
其中,Rover配置的Type格式,根据能输出原始观测值的设备来定,这个设备一定是要能吐出原始观测值的哟。这个设备采取哪种格式,具体见生产厂商的说明。这里我使用了串口,所以Type选择Serial,Format选择u-bolx。
Base Station 的Type选择NTRIP Client,Format选择RTCM3。
Transmit NMEA GPGGA to Base Station 选择Single Solution。我们需要将单点定位的结果发送给基站,千寻基站才会返回RTCM值回来。
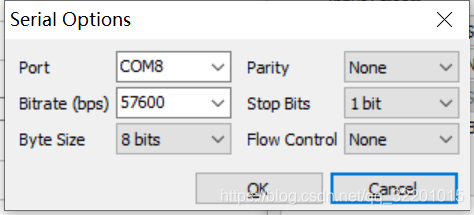
2.Rover配置:
主要对串口进行配置,选择你自己计算机上的接收机对应的COM口和接收机的比特率即可,这里我的接收机被分配的Port口为COM8,比特率之前设置为57600.
3. Base Station参数设置
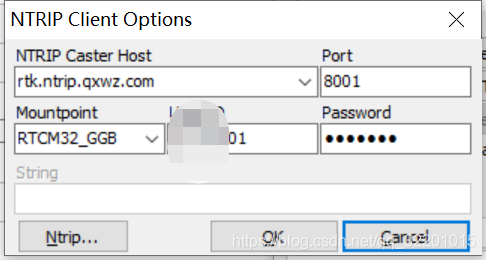
相关参数:
NTRIP Caster Host:rtk.ntrip.qxwz.com
Port:8001
Mountpoint:RTCM32_GGB
这里的User-ID和Password可通过注册并认证官网用户后,进入控制台找到自己购买的服务即可找到差分账号,这里我购买了千寻的FindMpro。

4.RTK配置
rtknavi主界面中,点击Options。
Setting1选项卡里,把定位模式设置为Kinematic。
底部根据收信需求,选择合适的GNSS信号源。这里我们选择GPS和Beidou。
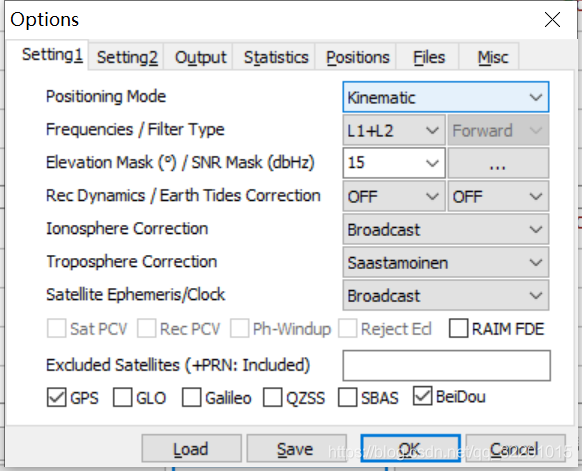
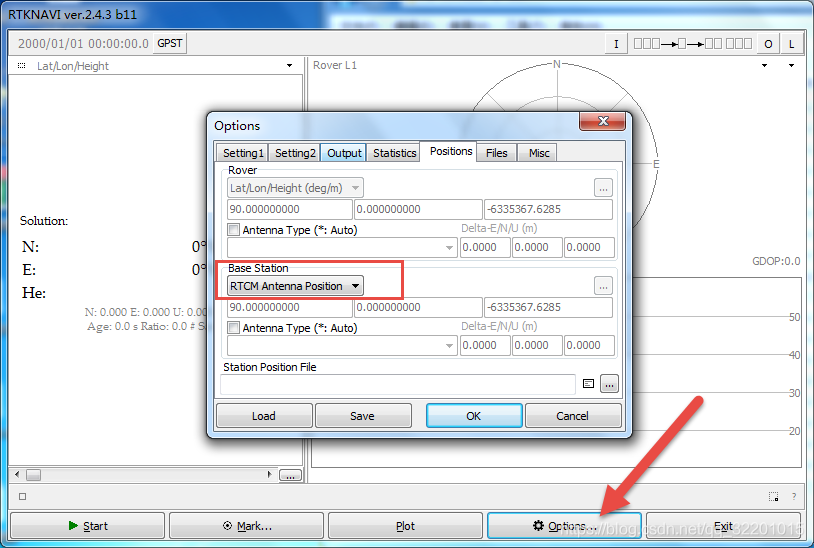
这里需要注意一点:Options选项卡的Base Station,请务必选择“RTCM Antenna Position”
5.定位
最后在rtknavi的主界面点击start即可开始进行RTK定位。
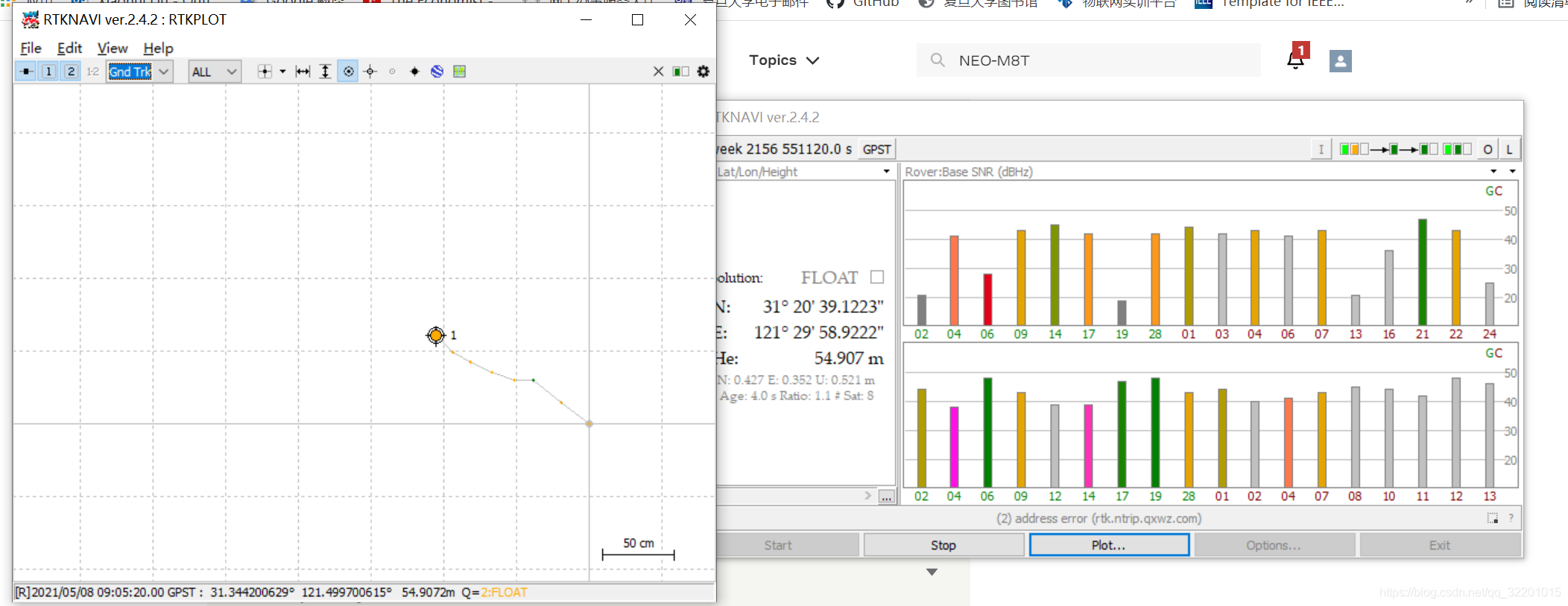
由于在窗边,信号不是很好,定位效果也不是很好,参数什么的都没有怎么修改,如果有什么建议,欢迎指正。
BTW
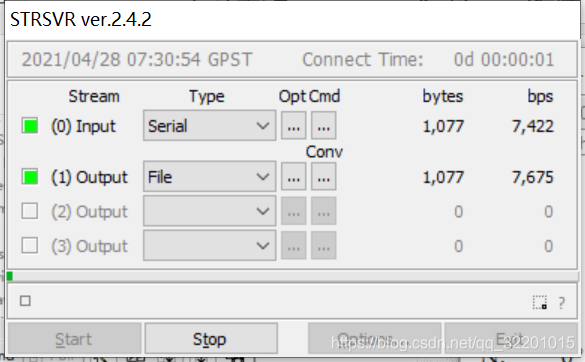
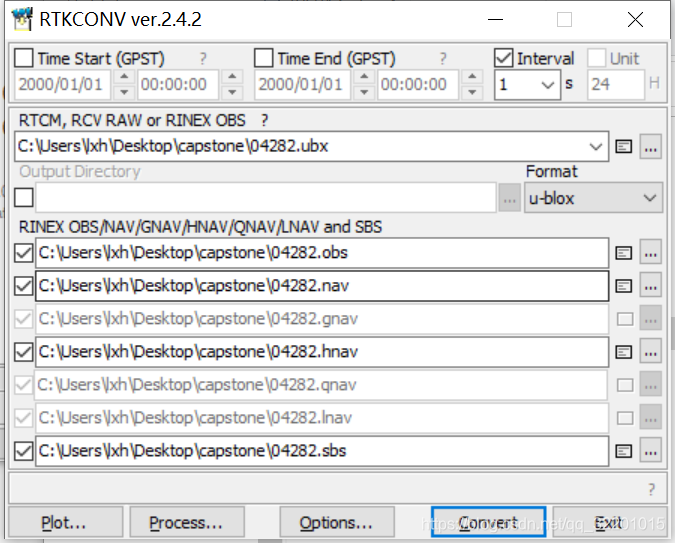
如果对得到的基站或者流动站数据不确定对不对的话,可以使用RTKLIB的文件接收软件strsvr和格式转换工具rtkconv来进行调试
比如我们不知道输出带原始数据的ubx文件的数据对不对,可以通过使用RTKLIB中的strsvr.exe来读取数据,使用rtkconv.exe进行格式转换来查看obs文件和nav文件。
其他可能出现的一些问题可以在参考资料寻找答案,各位大大都已经写的很详细了。
参考资料
https://blog.csdn.net/qq_34689354/article/details/115375744
https://bbs.qxwz.com/read.php?tid-313.html
https://blog.csdn.net/weixin_42586806/article/details/115187844
https://blog.csdn.net/m0_48012049/article/details/107882430