激光雷达研究笔记1:资料整理与学习_windows机对其评估使用
到手了一款型号为LDROBOT LiDAR LD19 的单线激光雷达模块,现对其进行学习使用:

1.对产品手册的研究:
通读产品手册后,我提炼了几方面有用的信息:
1.测量依据:
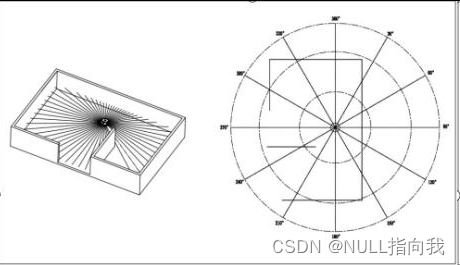
以下是激光雷达点云扫描示意图:
上电 后 3 秒内转速可稳定至 10±0.1Hz
LD19 测距核心采用 DTOF 技术,可进行每秒 4500 次的测距。
每次测距时, LD19 朝前发射出红外激光,激光遇到目标物体后被反射到单光子接收单元。由 此,我们获取到了激光的发出时间和单光子接收单元收到激光的时间,两者的时间 差即光的飞行时间,飞行时间再结合光速即可解算出距离。
2.pwm可控转速:
内部控速:
在 PWM 引 脚接地时,默认为内部调速,默认转速为 10±0.1Hz。
外部控速:
外部控速需要在 PWM 引脚接入方波信号,可通过 PWM 信号占空比控制电机的启、停和转速。
a、输入 PWM 频率 20-50K,推荐 30K;
b、占空比在(45%, 55%)区 间内(不包含 45%和 55%),
c、最少 100ms 持续输入时间。
触发外部控速后就一直 处于外部控速状态,除非断电重启才会恢复内部控速;同时可以通过调节 PWM 占空比进行转速控制。
3.串口单向发送数据:
LD19 采用单向通讯,稳定工作后,即开始发送测量数据包,不需要发送任 何指令。
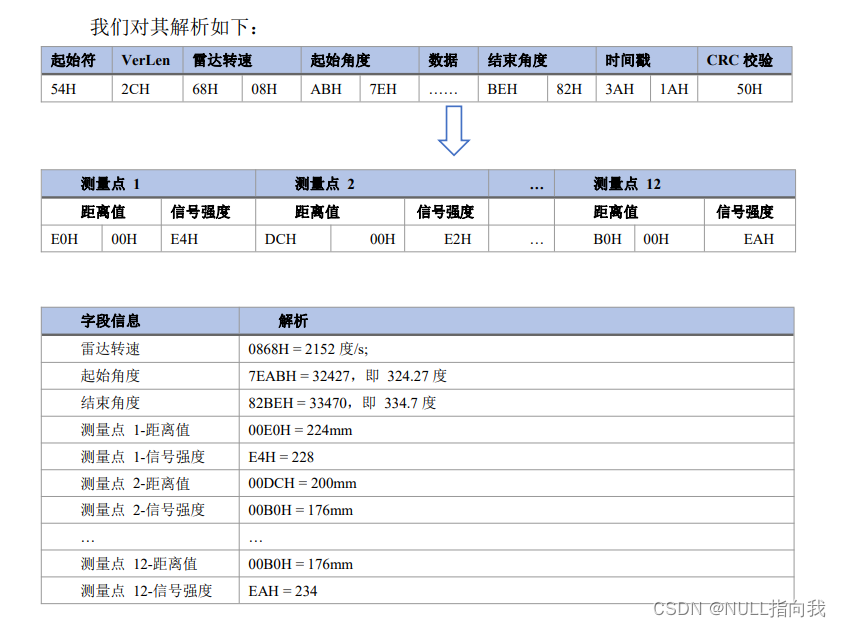
测试数据表格式如下:
 起始符: 长度 1 Byte,值固定为 0x54,表示数据包的开始;
起始符: 长度 1 Byte,值固定为 0x54,表示数据包的开始;
VerLen: 长度 1 Byte,高三位表示帧类型,目前固定为 1,低五位表示 一个包的测量点数,
目前固定为 12,故该字节值固定为 0x2C;
雷达转速: 长度 2 Byte,单位为度每秒;
起始角度: 长度 2 Byte,单位为 0.01 度;
数据: 一个测量数据长度为 3 个字节,详细解析请见下一小节;
结束角度: 长度 2 Byte,单位为 0.01 度;
时间戳: 长度 2 Byte,单位为 ms,最大为 30000,到达 30000 会重新 计数;
CRC 校验: 前面所有数据的校验和;
解算示例: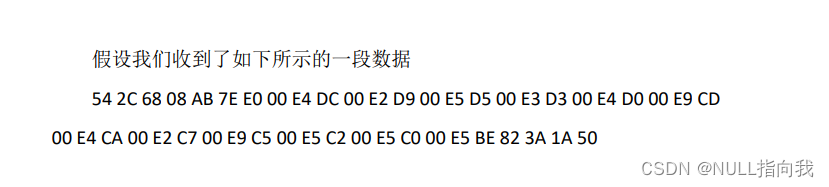
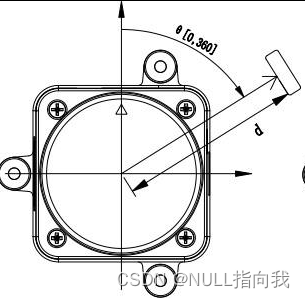
4. 坐标系:
LD19 使用左手坐标系,旋转中心为坐标原点,传感器的正前方定义为零度 方向,旋转角度沿着顺时针方向增大,具体如下图所示。
5.板载USB驱动:
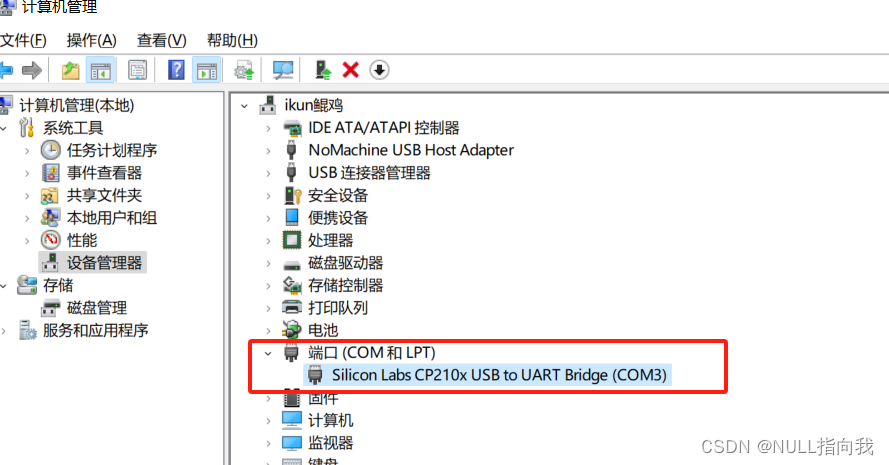
USB 转接板采用了 CP2102 USB 转串口信 号芯片,电脑上需要安装对应USB驱动程序
安装成功后就可以在 此电脑-管理-设备管理器 查找到该设备了:
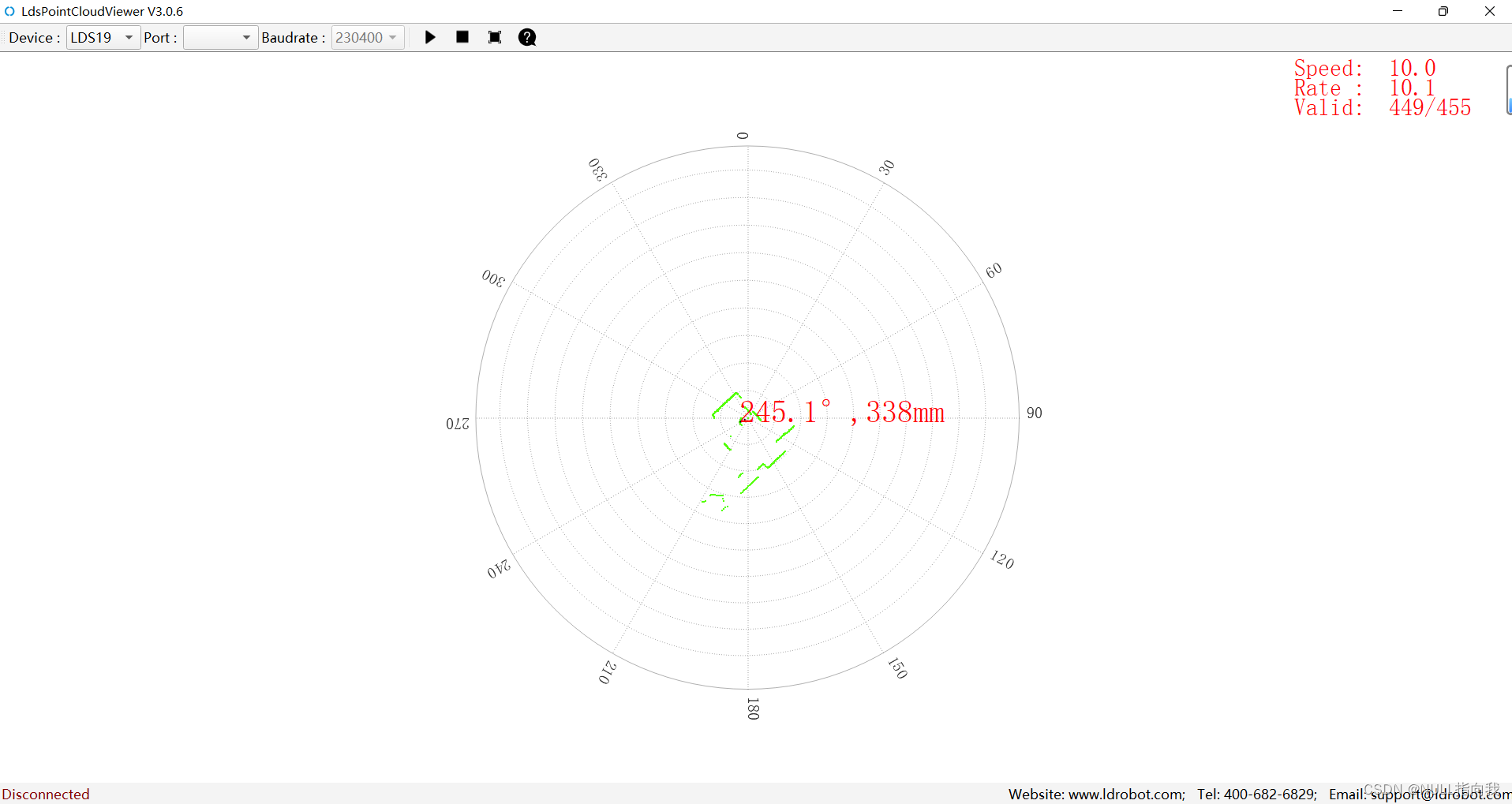
2.Windows上位机对其的初步评测使用:
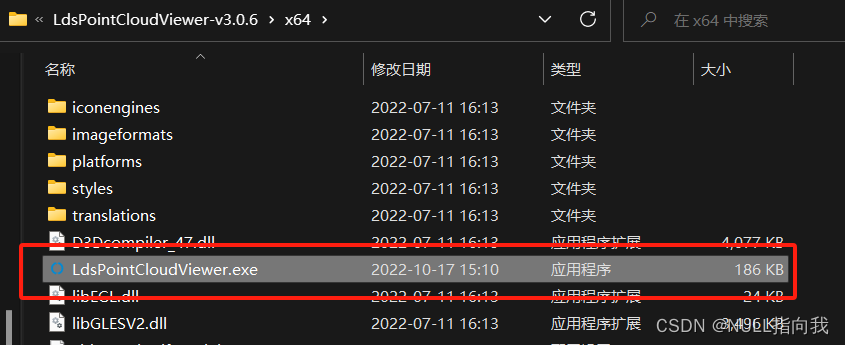
最简单的,在Windows上可以使用厂家提供的软件对其直接进行初步的评估使用:
软件下载地址如下:
这个软件没什么技术含量,连上电脑就能使用:
注意雷达的摆放和朝向、选择正确的device就行:
空白处右键鼠标可以设置画面各个元素显示的颜色什么的: