惯性导航原理(十)-INS 算法简介
INS 算法
一种典型的INS机械编排框图
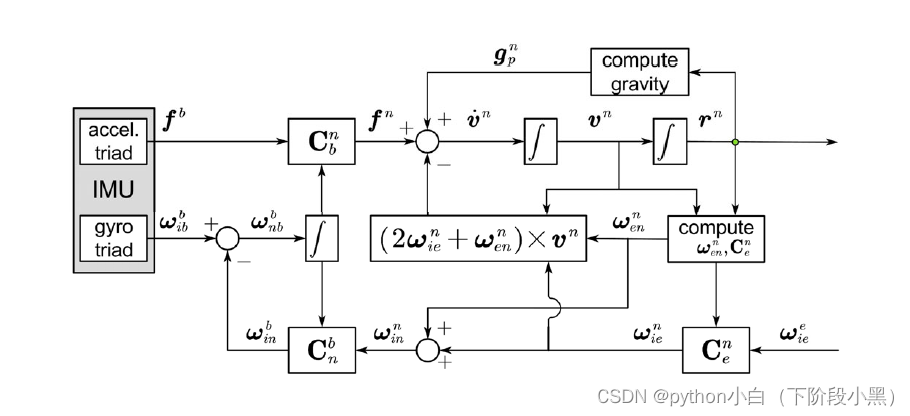
对上述算法流程进行简单讲述:
1.加速度计所在流程,可看作是主干;其测得的是b系下的比力,不能直接将其积分,那样没有意义,因此需要投影;这时就需要姿态矩阵,而由姿态角可得姿态阵,因此就需要陀螺给提供这一数值,将量由b系转换到n系;
2.当将比力投影到n系之后,还需要扣除重力加速度,这样我们就会得到一个纯正的运动加速度;实际上,还存在哥氏加速度,与重力加速度统称为有害加速度,我们需要把有害加速度都补偿掉
3.陀螺测的是b系相对于i系(惯性坐标系)的角速度,且是投影到b系上的;
4.下图为求得n系相对于n系得角速度在n系下得投影得公式,可以理解一下
(1)等式右边第一项,只要知道当地纬度就可求得,也就是地球自转在当地的北、东、垂向的投影
(2)等式右边第二项,这一项为牵连角速度,上面章节介绍过
5.算法图中的详细介绍,后续章节我们会介绍
INS测量
在使用惯导系统做测量应用之前
- 认真阅读设备使用手册
- 测试标定惯导系统, 估计出加速度计和陀螺仪的零偏和比例
因子误差的确定性部分,并加以补偿 - 采集长时间的设备数据, 用来估计加速度计和陀螺的随机误
差特性(例如,白噪声、零偏的一阶Gauss-Markov过程参数) - 根据陀螺的噪声参数(ARW)估算所需初始对准的时长(考
虑现实可行性), 以保证初始对准的航向角精度
做动态测试来演练并考核系统性能
- 验证导航算法实现的正确性, 精调算法参数, 预估辅助信息更
新所需要的频率来保障一定的测量精度. - 需要一个好的参考轨迹(参考真值,通常是GPS).
- 测试轨迹通常是富含典型动态信息的“L”或“S”形轨迹.
典型的正式测试任务
外业
- 静态模式下5-15分钟初始对准
- INS初始化(初始化速度和位置)
- (初始动态以便组合导航算法收敛)也就是加加速,左拐右拐等机动
- 定期进行零速修正(ZUPT) 或坐标修正(CUPT)
- (结束前动态改善反向平滑算法效果)也就是加加速,左拐右拐等机动
- 结束前静止1-2分钟(可以与初始静止的数据进行对比分析)
内业
- 用惯导算法和Kalman 滤波进行数据处理(实时或事后)
- 反向平滑处理(事后)
- 结果显示、检查和输出