深度学习(15):kitti数据集转rosbag包工具kitti2bag使用说明
1 安装
使用pip安装即可
pip install kitti2bag其中kitti2bag的github链接:https://github.com/tomas789/kitti2bag
 如果因为proxy代理的原因,一直pip install不了,可以试试换台电脑转换数据(这或许更有用)
如果因为proxy代理的原因,一直pip install不了,可以试试换台电脑转换数据(这或许更有用)
2.下载并解压数据数据
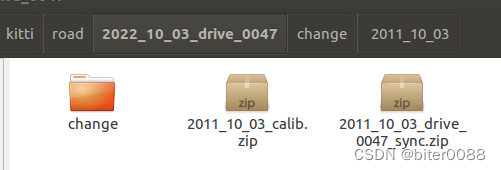
到网页:The KITTI Vision Benchmark Suite下载数据(可能需要注册);这里下载一个“数据栏”下的scnced+rectified data与calibration文件到同一个目录

完成后如下所示: (同时创建一个change文件夹)
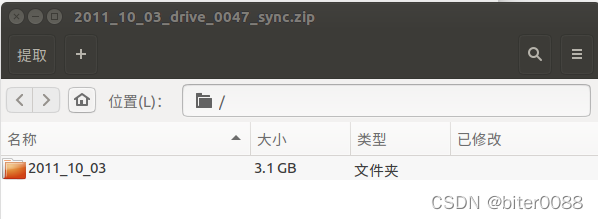
下面两步手动解压就是为了将两个压缩包的2011_10_03进行合并
手动解压2011_10_03_drive_0047_sync.zip到change目录,操作如下:
手动解压2011_10_03_calib.zip里面的标定文件到change/2011_10_03目录(2011_10_03位上一步解压得到的目录),操作如下(注意:需要选中全部的txt文件,而不是文件夹)
解压后目录如下:
[meng@meng /media/meng/5418189112144B70/kitti/road/2022_10_03_drive_0047/change]$ tree -L 4
.
└── 2011_10_03
├── 2011_10_03_drive_0047_sync
│ ├── image_00
│ │ ├── data
│ │ └── timestamps.txt
│ ├── image_01
│ │ ├── data
│ │ └── timestamps.txt
│ ├── image_02
│ │ ├── data
│ │ └── timestamps.txt
│ ├── image_03
│ │ ├── data
│ │ └── timestamps.txt
│ ├── oxts
│ │ ├── data
│ │ ├── dataformat.txt
│ │ └── timestamps.txt
│ └── velodyne_points
│ ├── data
│ ├── timestamps_end.txt
│ ├── timestamps_start.txt
│ └── timestamps.txt
├── calib_cam_to_cam.txt
├── calib_imu_to_velo.txt
└── calib_velo_to_cam.txt
14 directories, 12 files3 kitti数据转为rosbag数据
进入change目录
2011_10_03为数据所在目录,0047为下载数据的序号,其他类推
kitti2bag -t 2011_10_03 -r 0047 raw_synced .转换中:
转换完成:
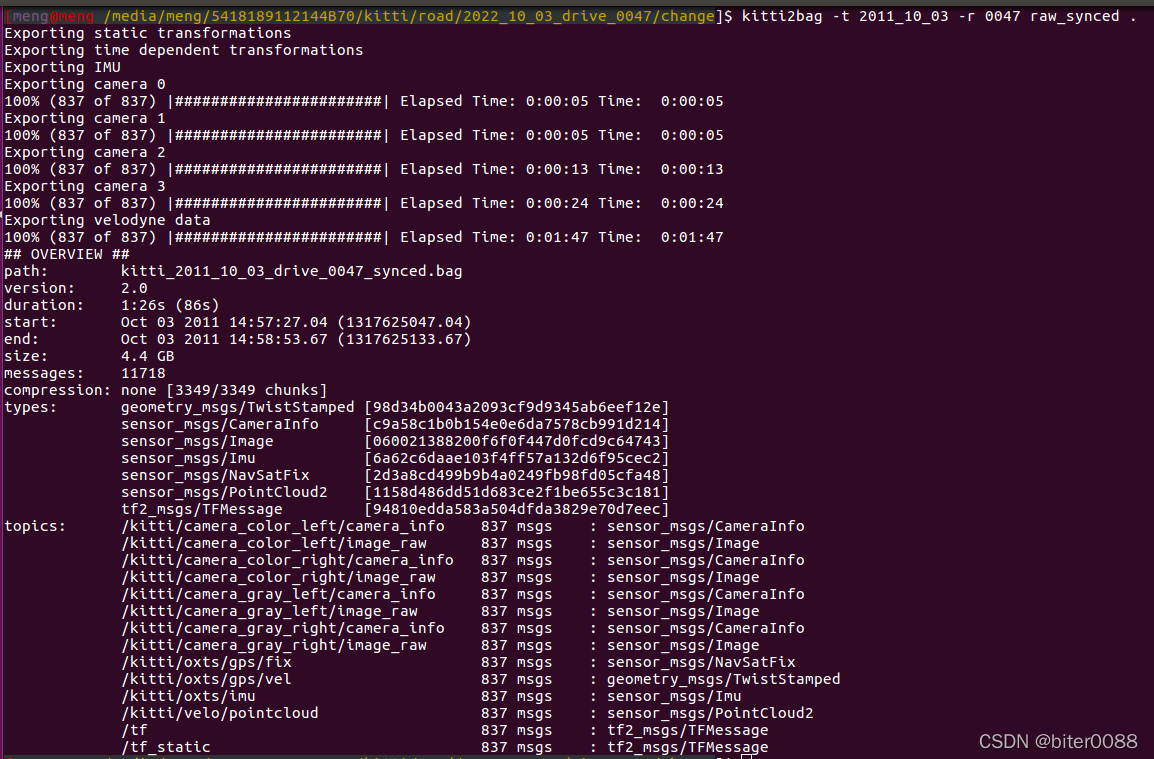
[meng@meng /media/meng/5418189112144B70/kitti/road/2022_10_03_drive_0047/change]$ kitti2bag -t 2011_10_03 -r 0047 raw_synced .
Exporting static transformations
Exporting time dependent transformations
Exporting IMU
Exporting camera 0
100% (837 of 837) |#######################| Elapsed Time: 0:00:05 Time: 0:00:05
Exporting camera 1
100% (837 of 837) |#######################| Elapsed Time: 0:00:05 Time: 0:00:05
Exporting camera 2
100% (837 of 837) |#######################| Elapsed Time: 0:00:13 Time: 0:00:13
Exporting camera 3
100% (837 of 837) |#######################| Elapsed Time: 0:00:24 Time: 0:00:24
Exporting velodyne data
100% (837 of 837) |#######################| Elapsed Time: 0:01:47 Time: 0:01:47
## OVERVIEW ##
path: kitti_2011_10_03_drive_0047_synced.bag
version: 2.0
duration: 1:26s (86s)
start: Oct 03 2011 14:57:27.04 (1317625047.04)
end: Oct 03 2011 14:58:53.67 (1317625133.67)
size: 4.4 GB
messages: 11718
compression: none [3349/3349 chunks]
types: geometry_msgs/TwistStamped [98d34b0043a2093cf9d9345ab6eef12e]
sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
sensor_msgs/Imu [6a62c6daae103f4ff57a132d6f95cec2]
sensor_msgs/NavSatFix [2d3a8cd499b9b4a0249fb98fd05cfa48]
sensor_msgs/PointCloud2 [1158d486dd51d683ce2f1be655c3c181]
tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec]
topics: /kitti/camera_color_left/camera_info 837 msgs : sensor_msgs/CameraInfo
/kitti/camera_color_left/image_raw 837 msgs : sensor_msgs/Image
/kitti/camera_color_right/camera_info 837 msgs : sensor_msgs/CameraInfo
/kitti/camera_color_right/image_raw 837 msgs : sensor_msgs/Image
/kitti/camera_gray_left/camera_info 837 msgs : sensor_msgs/CameraInfo
/kitti/camera_gray_left/image_raw 837 msgs : sensor_msgs/Image
/kitti/camera_gray_right/camera_info 837 msgs : sensor_msgs/CameraInfo
/kitti/camera_gray_right/image_raw 837 msgs : sensor_msgs/Image
/kitti/oxts/gps/fix 837 msgs : sensor_msgs/NavSatFix
/kitti/oxts/gps/vel 837 msgs : geometry_msgs/TwistStamped
/kitti/oxts/imu 837 msgs : sensor_msgs/Imu
/kitti/velo/pointcloud 837 msgs : sensor_msgs/PointCloud2
/tf 837 msgs : tf2_msgs/TFMessage
/tf_static 837 msgs : tf2_msgs/TFMessage
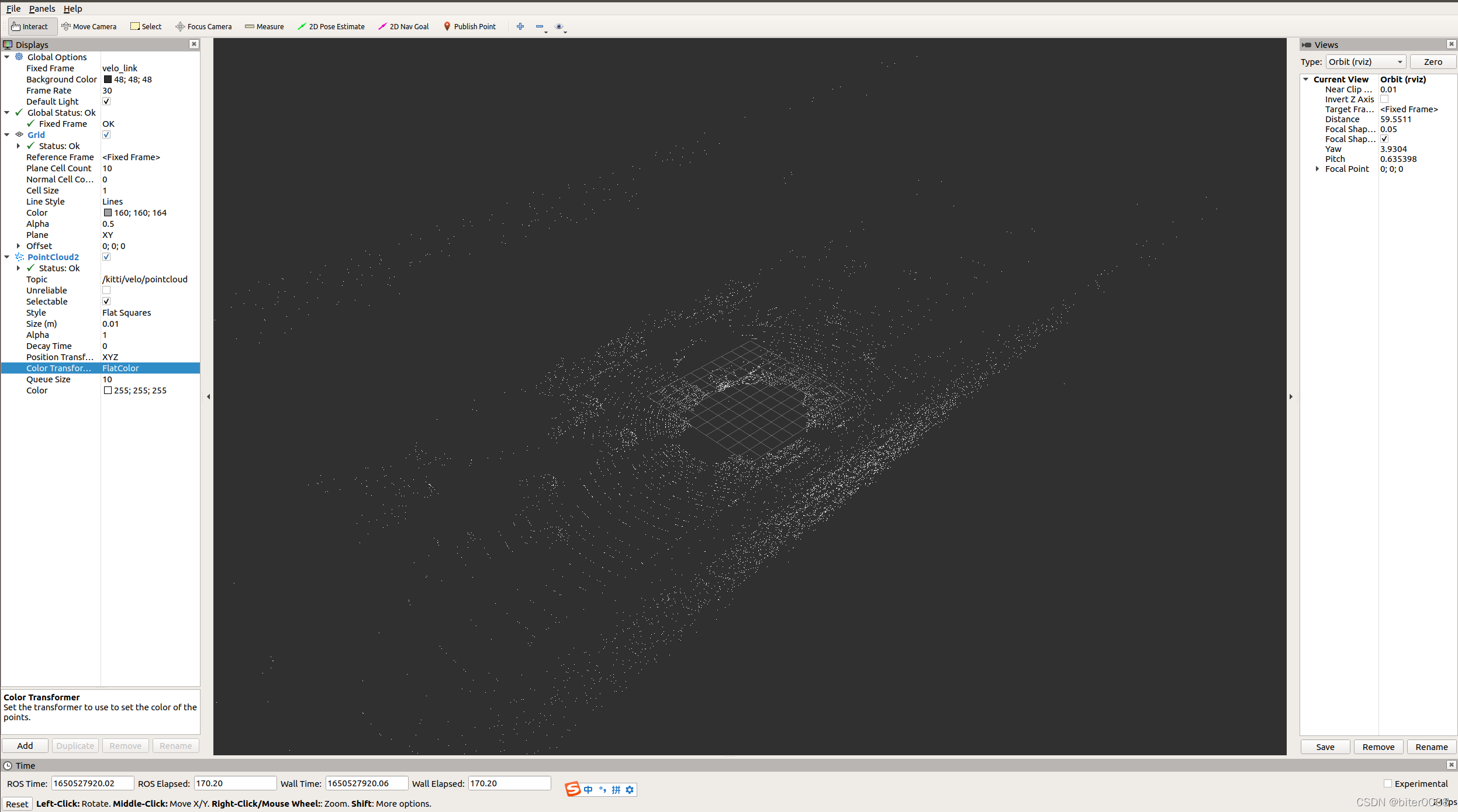
播放数据包